Japan
サイト内の現在位置を表示しています。
はやぶさ2の快挙をセンシング技術で支えた「衛星搭載ライダー」
未来の社会を支える最先端技術 ~ 宇宙で活躍する先端技術 PDFで閲覧する
PDFで閲覧する小惑星探査機「はやぶさ2」をはじめ、世界各国で深宇宙探査ミッションが競うように立ち上がっているなか、月・惑星探査に必須の技術となっているのがライダー(LIDAR:Light Detection and Ranging)です。アポロ計画以降、ライダーは探査機の高度情報を取得しさまざまな天体の地形観測に利用されています。日本では月探査の月周回衛星「かぐや」に搭載された他、2020年代前半の打ち上げを目指している「火星衛星探査(MMX:Martian Moons eXploration)」にもライダーが搭載される予定です。NECが開発した探査衛星用ライダーと、2021年現在の取り組みについて紹介します。
1. はじめに
小惑星探査機「はやぶさ2」は、小惑星「リュウグウ」へ2回のタッチダウンを行い、サンプルの入ったカプセルを地球に届けることに成功しました。GPSなどの航法支援が得られず、地球からのリアルタイム制御ができない遠い深宇宙では、探査機の自律制御の実現にライダーが欠かせません。
本稿では、NECが開発した月周回衛星「かぐや」と「はやぶさ2」に搭載されたライダー(LIDAR:Light Detection and Ranging)(以下、LIDAR)と、2021年現在開発中の火星衛星探査機(MMX:Martian Moons eXploration)(以下、MMX)用のライダーについて紹介します1)。
2. 「かぐや」レーザー高度計
「かぐや」は2007年9月に打ち上げられた月探査機で、定常運用と後期運用の約1年半の観測を終え2009年6月に月面へ制御落下しました。
「かぐや」のレーザー高度計(LALT:Laser Altimeter)(以下、LALT)2)はノミナル高度100km(重力の影響で50 kmから150 kmの範囲で変化する軌道を定期的に約100kmの高度に修正)から、月面までの距離や反射率を観測し、月の詳細な地形図の作成に貢献しました。それまで得られていなかった月の極域データ取得に成功し、月の正確な重心推定などに利用されています。
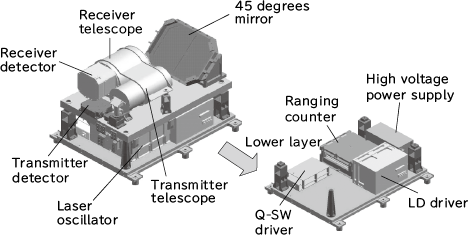
「かぐや」LALTは2つのユニットに分かれています(写真1)。合計の質量は19.1kg、消費電力44.2W、距離分解能は1mです。光の送受信を行うレーザー送受信部(LALT-TR)の内部構造を図1に示します。
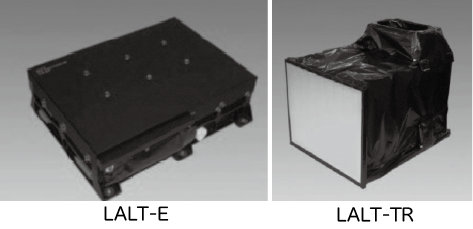
右:レーザー送受信部(LALT-TR)
LALTの特徴は、100mJクラスのレーザー出力です。衛星搭載としては大きなパルスエネルギーで、斜面や凹凸によって低下する受信パルスの波高値を補い、起伏の激しい月面高度データの取得率向上に貢献しました。
レーザーの送受信を行うLALT-TRは、図1に示すように2階建構造になっています。熱歪を回避したい光学系を上段に集め、下段に発熱する各種ドライバ回路を設置しました。上段と下段の結合、レーザー発振器及び送受信望遠鏡の設置にはキネマティックマウントを使用し、熱分布によるゆがみの影響を最小限にしています。
レーザー発振器は、パルスエネルギー100mJ、パルス幅17ns、繰り返し1HzのQスイッチNd:YAGレーザーです。レーザー発振器の光学レイアウトを図2に示します。
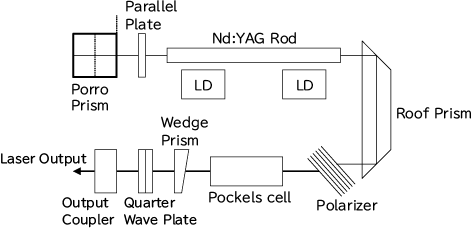
レーザー結晶と励起用レーザーダイオード(LD)で構成される励起モジュールは、励起分布の均一性を図るためYAGロッドの側面8方向にLDが設置されています。真空中で動作させることから、大気中評価時とのコーティングの特性変化を懸念し、無コーティングのポラライザを使用しています。Qスイッチ素子にはLiNbO3を使用し、1/4波長板とポッケルスセルの1/4波長電圧動作の組み合わせで行うアクティブQスイッチ方式です。レーザー発振器の寸法は150×170×83mm、質量は約1.6kgです。
送受信望遠鏡は、炭素繊維強化プラスチック(CFRP)製の鏡筒で送受を一体化することで軽量化しました。受信系は口径110mmのカセグレン望遠鏡、送信系は10倍のガリレオ式望遠鏡を採用しています。カセグレンの材料は石英を使用しています。
「かぐや」LALTの軌道上でのレーザーショット数は、18カ月間のミッション期間で約2,200万ショットになり、そのデータは月の起源や、月面開発に向けての研究に使われています。
3. 「はやぶさ2」LIDAR
「はやぶさ2」LIDAR3)は、小惑星「リュウグウ」の全休マッピング、タッチダウン直前までの航法支援、及び反射率測定などの科学観測で使用されました。観測範囲は30m-25km、装置全体の質量は3.52kg、消費電力18W、距離分解能は0.5mです。
LIDARの外観を写真2に示します。

レーザー発振器はパルスエネルギー15mJ、パルス幅7ns、繰り返し1HzのQスイッチNd:YAGレーザーです。「はやぶさ」初号機や、「かぐや」の経験を踏まえ、真空中の熱歪に起因するLiNbO3の焦電効果の影響を避けるため、Qスイッチにはパッシブ方式を採用しました。また、レーザー媒質とパッシブQスイッチ素子をボンディングしたコンポジット結晶を使用し、1つの光学素子で共振器を構成しています(図3)。このモノリシック共振器構成により、ミスアライメントや光学ダメージのリスクの低減に成功しています。レーザー発振器の寸法は66×90×40mm、質量は190gで、リソースの厳しい小惑星探査機の要求に大きく寄与しました。レーザー発振器の外観を写真3に示します。

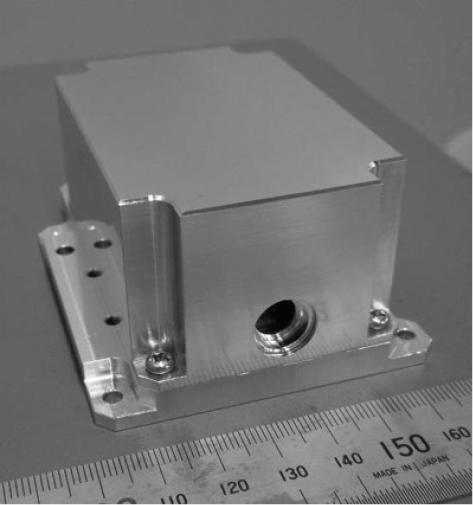
(エンジニアリングモデル)
観測範囲30m-25kmの受信系ダイナミックレンジの確保は、光学系を2つに分け、それぞれの検出器でゲイン調整を行う方式を採用しました。遠距離系と近距離系の光学系には1345:1の面積比をつけ、光検出器(APD: Avalanche Photodiode)の逆バイアス電圧の2段階の切り替えと組み合わせ4段階に可変し、30mから25kmの観測範囲全域で測距精度を確保しました。ゲイン切り替えは、受信レベルを検出してAutomatic Gain Control(AGC)により自律的に行います。
遠距離系の受信光学系は、開口127mm(遮蔽ロスを考慮した有効開口で110mm)のカセグレン望遠鏡です。材料には宇宙用に開発されたNew-Technology Silicon Carbide(NT-SiC) を使用し、軽量化を図っています。送信系には3倍のエキスパンダを設置し、透過後のビーム拡がり角は2.4mradです。
運用モードには通常の測距モードの他、科学観測を目的としたダストカウントモードと、地球の衛星レーザー測距(SLR:Satellite Laser Ranging)局と光リンク実験を行う光リンクモードがそれぞれあります。
「はやぶさ2」LIDAR の軌道上でのレーザーショット数は、2021年1月時点で約711万ショットであり、次の目的地での活躍も期待されています。
4. MMX用LIDAR
MMXは2021年現在開発中の探査機であり、2024年の打ち上げが計画されています。火星衛星(フォボス)に着陸機を降ろしサンプルリターンを行う計画です。MMX LIDARの観測範囲は100mから100kmであり、「はやぶさ2」と同程度の60dBのダイナミックレンジが要求されています。
MMX LIDARは「はやぶさ2」LIDARの設計を流用しつつ、レーザー出力の増大と受信回路の改良を行っています。前述の通り「はやぶさ2」では遠近2系統の光学系を採用しましたが、国立研究開発法人宇宙航空研究開発機構(JAXA)様が開発中であった広ダイナミックレンジの専用IC(集積回路) LIDARX が完成し、1系統化実現が可能になりました4)。
LIDARXの回路構成を図4に示します。
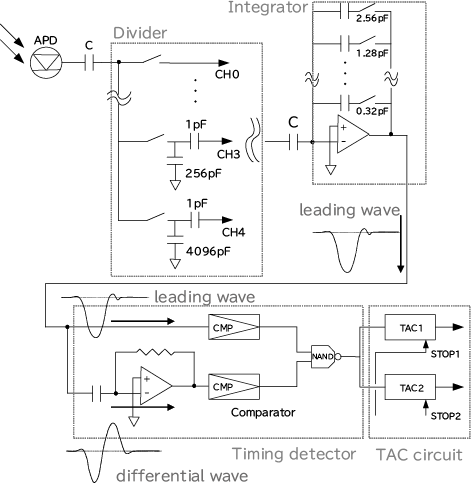
LIDARX(JAXA様開発品)の回路構成
LIDARXはDivider、Integrator、Timing detector及びTime-to-analog converter(TAC) circuitで構成されています。Dividerは、測距距離で変わるAPD出力の電荷量を適切な容量を選択して分割します。入力電荷は、Integratorで電流-電圧変換されLeading waveを生成します。Leading waveは、Timing detectorの微分回路でDifferential waveに変換され、そのゼロクロス点が信号タイミングとして検出されます。検出されたタイミングはTAC circuitでアナログ信号に変換され、距離がアナログレベル信号として出力されます。TAC circuitを使用することで、宇宙用デバイスでは扱いが困難な高速のクロックを使用することなく、高い距離分解能を実現できます。
MMX LIDARは、「はやぶさ2」LIDAR同様にパッシブQスイッチ方式のNd:YAGレーザーです。レーザー出力20 mJ以上、10ns以下、繰り返し1Hzであり、装置質量4.7 kg以下、距離分解能0.1m以下を目標としています。
2021年現在、クリティカル部の部分試作評価を終え、フライトモデル製作の前に行う技術評価用のエンジニアリングモデルの開発を進めています。
5. むすび
「かぐや」「はやぶさ2」から「MMX」につながるNECの月・惑星探査用ライダーについて、技術の一部を紹介しました。これらの技術は、探査ミッション以外の宇宙機器でも利用可能です。2021年現在、宇宙輸送機のランデブドッキング用のライダー開発も進んでおり、今後広がるさまざまな宇宙ミッションに衛星搭載ライダーの活躍が期待されています。
最後に、本開発を成功に導くうえで、また開発中の装置においても継続的にご指導いただいているJAXA様、国立天文台様及び千葉工業大学様、それからご尽力いただいたメーカー各社の皆様に心から感謝を申し上げます。
参考文献
- 1)加瀬貞二ほか:月・惑星探査用ライダー,レーザセンシング学会誌,2巻1号,pp.31-36,2021.4
- 2)H. Araki et al. :Lunar Global Shape and Polar Topography Derived from Kaguya-LALT Laser Altimetry,Science,Vol.323 ,2009
- 3)T. Mizuno et al. :Development of the Laser Altimeter (LIDAR) for Hayabusa2,Space Science Reviews,Vol.208 ,2017
- 4)T. Mizuno et al. :Pulse Detection IC for a Laser Altimeter Using CMOS Technology,Transactions of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology Japan,Vol. 10 No. ists28,2012
執筆者プロフィール
加瀬 貞二
電波・誘導事業部
主任
電波・誘導事業部
主任
黛 克典
電波・誘導事業部
マネージャー
電波・誘導事業部
マネージャー
生瀬 裕之
電波・誘導事業部
電波・誘導事業部
 はやぶさ2プロジェクト
はやぶさ2プロジェクト