Japan
サイト内の現在位置を表示しています。
はやぶさ2 リュウグウへの高精度タッチダウンを実現した自律航法誘導制御
未来の社会を支える最先端技術 ~ 宇宙で活躍する先端技術 PDFで閲覧する
PDFで閲覧する小惑星探査機「はやぶさ2」は、地球から約3億km彼方の小惑星「リュウグウ」に到着後、目標地点誤差約1mの高精度タッチダウンに成功しました。このタッチダウン成功に大きく貢献したのが「自律航法誘導制御システム」であり、小惑星表面の厳しい環境条件や長い通信遅延時間を克服できる自律的な誘導制御により、タッチダウンを実現しました。本稿では、軌道上実績とともに、ターゲットマーカ及びレーザー高度計を用いた「自律航法誘導制御システム」を紹介します。
1. はじめに
2014年12月3日にH-IIAロケットにより打ち上げられた小惑星探査機「はやぶさ2」は、2018年6月に小惑星「リュウグウ」に到着し、2019年2月22日に1回目のタッチダウン(以下、TD)、2019年7月11日に2回目のTDに成功し、小惑星表層及び内部のサンプルを採取しました。そして、2020年12月6日のカプセル帰還により、太陽系の起源、生命の起源の研究に大きく寄与する成果を得ました。
「はやぶさ2」は、地球から約3億km離れた「リュウグウ」上のTD目標点からの誤差約1mの高精度TDを実現しました。その中心的役割を果たしたのが、「自律航法誘導制御システム」です。小惑星表面付近の熱環境に起因した滞在時間制約及び通信時間の制約から、地上で探査機の状態を確認・判断しながらシーケンスを実行することができず、探査機が自律的に判断することが必須となります。
本稿では、「はやぶさ2」のシステム構成、TDシーケンス及び軌道上実績とともに「自律航法誘導制御技術」を紹介します。
2. TDを実現した「はやぶさ2航法誘導制御システム」
2.1 「はやぶさ2 航法誘導制御システム」
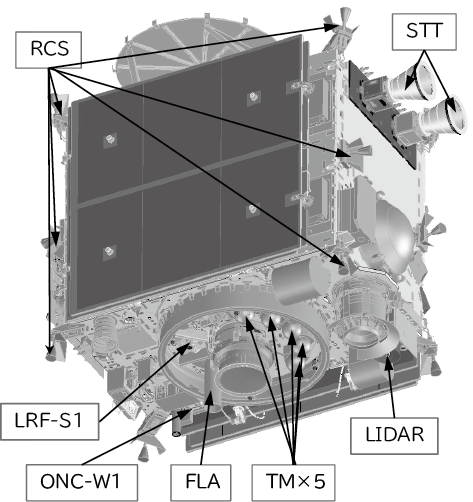
図1に、「はやぶさ2 航法誘導制御システム」の外観図を示します。「はやぶさ2」は標準的な航法誘導制御装置として、探査機の姿勢を推定するための恒星センサー(Star Tracker:STT)、慣性基準装置(Inertial Reference Unit:IRU)、探査機の位置・姿勢を制御するための化学推進系(Reaction Control System:RCS)、リアクションホイール(Reaction Wheel:RW)を搭載しています。また、TD用の航法誘導制御装置として、小惑星までの距離を測るレーザー測距装置(Light Detection And Ranging:LIDAR)、小惑星との相対位置を把握するためのナビゲーションカメラ(Optical Navigation Camera-W1:ONC-W1)、小惑星上のランドマークとなるターゲットマーカ(Target Marker:TM)、それを光らせるフラッシュランプ(Flash:FLA)、小惑星表面上の4点の距離を測って小惑星のローカルな表面に対する傾きと距離を計測するためのレーザー測距装置(Laser Range Finder-S1:LRF-S1)を搭載しています。
2.2 ピンポイントTDシーケンス
表に、ピンポイントTDシーケンスの概要を示します。TD運用に先立ち、高度約20mまで降下し、あらかじめ「リュウグウ」の画像解析により定めたTD目標地点(平坦地)付近にTMを投下します。その後いったん高度20kmのホームポジションまで退避し、TD目標地点のTM相対位置を計算してからTD運用を実施します。TD運用では、「リュウグウ」の自転速度、探査機の降下速度を考慮して、高度45m到着時に投下済のTMがONC-W1で視認できる位置に探査機が到達するタイミングで、降下を開始します。高度5kmまではONC-W1で撮像した「リュウグウ」の画像から小惑星相対位置を推定し、地上の運用者による制御を実施します。高度5km以降は、「リュウグウ」の重力推定誤差の影響により、通信遅延時間を踏まえた地上制御では制御精度が確保できないため、LIDAR高度情報を利用して探査機が自律的高度制御を実施し、高度45mまで到達します。
表 TDシーケンス概要

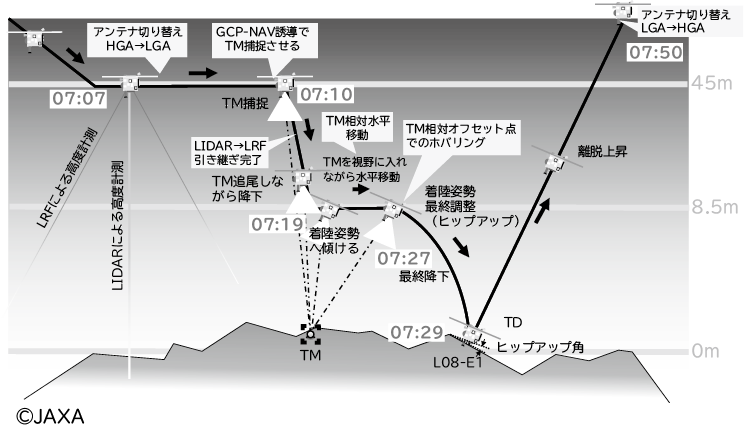
高度45mにおいてTMを視認すると、TMを使用した自律航法誘導制御に切り替えます。図2に、高度45m以降のTDシーケンスを示します。探査機自身がTM及びLIDAR・LRFの高度情報を使用してTM相対位置推定を行い、目標軌跡に沿った位置、姿勢に沿わせるような制御を行うことで、TD目標点への誘導制御を実施します。
3. 自律航法誘導制御技術
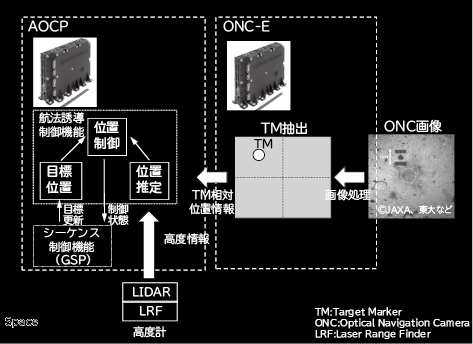
「はやぶさ2」の「自律航法誘導制御システム」は、「はやぶさ」初号機のヘリテージを活用して、「はやぶさ2」特有のミッションである衝突装置(Small Carry-on Impactor:SCI)で生成したクレータからサンプルを採取するピンポイントTDに対応するため、改良を加えたものです。「自律航法誘導制御システム」の模式図を図3に示します。航法誘導制御システムは大きく、「TM相対位置推定技術」と「自律誘導制御技術」から構成されます。
3.1 TM相対位置推定技術
TD目標地点は、TDリハーサルで取得した近接画像を用いて、小惑星上のTMを原点とした座標系(Navigation Target:NT座標系)で指定されます。NT座標系における探査機の位置を推定するために、NT座標系での探査機から見たTM方向及び高度情報が必要となります。
TM認識用の計算機ONC-Eは、ONC-W1、FLAに対して撮像指示及び発光指示を行い、画像処理によりTMを抽出します。TMは再帰反射材で覆われており、FLAの光をよく反射します。FLAを発光させて撮像した画像とFLAを発光させずに撮像した画像を取得し、差分画像を生成します。この差分画像に対して、2値化処理、ラベリング処理、重心計測処理を行うことで、TMのONC-W1画角内でのCCDアドレスを算出します。
姿勢軌道制御用計算機AOCPは、ONC-Eで算出されたTMのONC-W1画角内CCDアドレス及び撮像時の姿勢推定値を用いて、NT座標系における探査機から見たTM方向を算出します。TM方向及びLIDAR/LRFから得られる高度情報を観測更新情報として、カルマンフィルタによりNT座標系における探査機の位置を推定します。
3.2 自律誘導制御技術
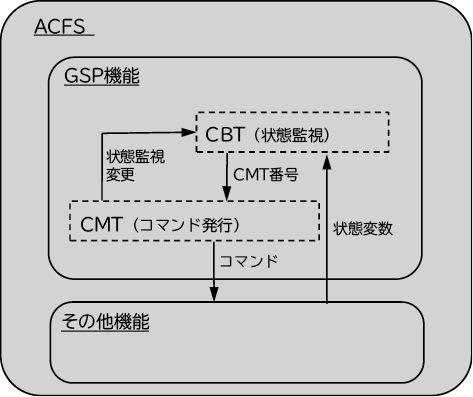
「リュウグウ」到着前はその地形や環境条件は不確定であるため、到着後にTDシーケンスを変更する可能性がありました。そこで姿勢軌道制御系計算機(AOCP)内の搭載ソフトウェアACFS内に、プログラマブルな自律誘導制御(Guidance Sequence Program:GSP)機能を持たせました。GSP機能は、2つのテーブルから構成されます。探査機の状態を監視し、状態に応じた分岐を定義するCBT(Conditional Branch Table)と分岐に応じたコマンドを実行するCMT (Command Memory Table)です(図4)。GSP機能により、TDシーケンスに必要なTM直上への移動、降下制御などを探査機の安全性を確認しながら実行することができます。
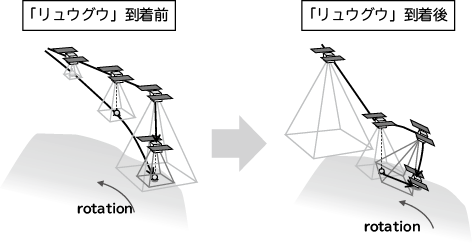
実際、「リュウグウ」到着前には半径50m程度の平地を想定していましたが、到着後の観測により半径3m程度の平地しかないことがわかりました。当初は、図5左のように、投下したTMをONC-W1視野にとらえ続けるよう追尾して、半径50mの平地内でTMが静止した場所にTDする計画でしたが、図5右のように、もともと衝突装置(Small Carry-on Impactor:SCI)で生成したクレータにTDするために準備した、投下済のTMを目印としてTM相対位置で指定された目標地点にTDする、第2章2節で紹介したピンポイントTD計画に変更しました。また、1回目のTDで舞い上がった粉塵により、ONC-W1、LIDAR、LRFの性能が劣化するという不測の事態により、TM視認高度、LIDAR/LRF切り替え高度などを変更する必要がありました。このどちらに対してもCBT、CMTを書き換えることで、2度のTD成功に導きました。
4. 軌道上実績
2019年2月22日、高度20kmのホームポジションを出発した「はやぶさ2」は、22時07分(UTC)、定刻通りにTM上空45mに到達しました。
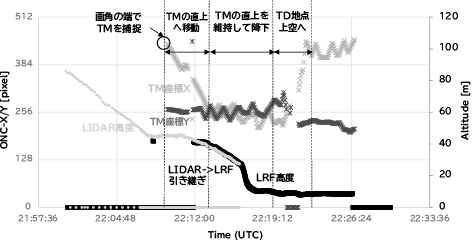
図6は、ONC-W1画角内におけるTMのCCDアドレスX、Y及びLIDAR、LRFによる高度の履歴です。高度45mにおいて、ONC-W1の画角の端にTMを捕捉しました。 自律制御によりTM直上に移動(画角の中心にTMを移動)し、TM直上を維持しながら高度を8.5mまで下げました(写真)。高度8.5m到達後、あらかじめ投下したTM相対で決めたTD点の上空に移動し、TD姿勢に姿勢を変更した後、降下制御を行い、22時29分(UTC)にTDを検知しました。

5. 今後の事業展開
自律航法誘導制御技術は、物体をセンサーでとらえ、相対位置を把握、接近する技術であり、宇宙利用が進むにつれて深刻化するスペースデブリの状況把握や除去、宇宙空間での燃料補給などさまざまな分野に応用が可能です。NECは、「はやぶさ」「はやぶさ2」で培った技術力を生かして新たなソリューションを提供します。
6. むすび
本稿では、「はやぶさ2」のTDに大きく貢献した自律航法誘導制御技術について説明してきました。「はやぶさ」で技術実証された自律航法誘導制御技術は、「はやぶさ2」のTD運用をはじめとしたミッション運用の成功により確立され、宇宙利用事業に応用する段階となりました。
「はやぶさ2」は地球帰還後、11年にも及ぶ拡張ミッションに旅立ちました。NECは、引き続き拡張ミッションをサポートします。
執筆者プロフィール
保田 誠司
宇宙システム事業部
主任
宇宙システム事業部
主任
神谷 俊夫
宇宙システム事業部
マネージャー
宇宙システム事業部
マネージャー
松島 幸太
宇宙システム事業部
主任
宇宙システム事業部
主任
