Japan
サイト内の現在位置を表示しています。
重作業の省人化・無人化を実現するロボティクス技術
未来の社会を支える最先端技術 ~ 社会に浸透してゆく先端技術 PDFで閲覧する
PDFで閲覧する日本では、少子高齢化により重作業を伴う産業の労働力不足が、問題になっています。この労働力不足を補う技術として注目されているのが、ロボティクス技術です。本稿では、ロボティクス技術として、防衛装備庁の研究試作事業で設計・製造した、装着者の重量負荷軽減と俊敏性を両立し不整地にも対応可能な「高機動パワードスーツ」と、事前地図情報によらない不整地での自律走行を可能とする「多目的自律走行ロボット」に関して、各々の事業背景、構成、主要技術及び将来展望について紹介します。
1. はじめに
日本での少子高齢化が急速に進むなか、重作業を伴う産業における若年就業者の減少や熟練作業者の離職者の増加が、大きな社会問題として顕在化しています。そのなかで、重作業の省人化や無人化を進展させ得る技術として、ロボティクス技術が注目されています。防衛分野においても、省人化、無人化、更には隊員の被害の極小化(レスカジュアリティ)の実現に向けて、ロボティクス技術に関する研究が進められています。
本稿では、ロボティクス技術として防衛装備庁の研究試作事業において設計・製造した、「高機動パワードスーツ」と「多目的自律走行ロボット」について紹介します。
2. 高機動パワードスーツ
2.1 事業背景
パワードスーツは、装着することで人の動作を支援する機能を備える機器です。近年、民生分野において、リハビリ用途や荷物を持ち上げる作業を支援する用途で、パワードスーツの現場実装が促進されつつあります。また、防衛分野においても、より過酷な環境での運用や防衛特有の運用を想定したパワードスーツの研究開発が、各国で盛んに行われています。日本においても研究が進められており、第2章では、防衛装備庁の研究試作事業「高機動パワードスーツの研究試作」にて設計・製造した、研究試作品について紹介します1)2)3)。
2.2 高機動パワードスーツの構成
高機動パワードスーツには、島しょ防衛や災害派遣などのさまざまな任務において、隊員が装着・携行する装備品などの重量による負担を軽減することに加え、隊員の迅速機敏な行動を可能にすること、更に砂地や山岳地などといった不整地にも対応することが求められます。これらの要求の実現に向けて、本パワードスーツは、外骨格構造により重量負担を受け持ちつつ、装着者の動作に追従する機構を備える下肢に装着するタイプの構成としています。写真1に高機動パワードスーツの外観を示します。

本パワードスーツは、股関節と膝関節にアクチュエータを、足関節に軽量な板バネ構造を備えています。各アクチュエータなどで発生させたトルクで荷重を支え、更に外骨格のフレームを通じて荷重を地面に逃がすことにより、荷重軽減アシストを実現しています。表に研究試作品の主要性能を示します。
表 高機動パワードスーツの主要性能

2.3 主要技術
高機動パワードスーツの性能を達成するための3つの主要技術を、次に示します。
2.3.1 高応答・大出力駆動システム技術
重量物を支持しつつ迅速機敏な行動を可能にするには、パワードスーツを駆動するシステムの大出力化と高応答化が必要です。各関節に備わるアクチュエータ及びそれらの制御を最適化することにより、歩行だけでなく駆け足のような素早い動作を可能にしています。
2.3.2 不整地バランス制御技術
防衛用途の運用では、野外の不安定な地面でも人のバランス能力を阻害しないことが求められます。装着者の身体に合った形状のフレームと、動作に機敏に追従する制御技術により不整地での動作を可能にしています。
2.3.3 安全性確保技術
パワードスーツは、身体に装着する機器のため運用時の安全性を確保することが非常に重要になります。そのため、ロボットの国際安全規格であるISO134824)に準拠したリスクアセスメントを実施し、危険源分析に基づいた安全対策を行うことで安全性を担保しています。
2.4 今後の展望
高機動パワードスーツの実用化に向けて、防衛装備庁において本研究試作品を使用した各種性能試験が実施されてきました。実験室環境の試験では、装着者が高機動パワードスーツを着用して荷重を携行した状態でトレッドミル上を歩行・走行し、三次元動作解析装置などを用いた動作解析が行われました。また、屋外の不整地での試験も実施され、運動性能や装用性等の評価が進められました。写真2に、屋外における高機動パワードスーツの機能検証の様子を示します。今後、パワードスーツが広く研究開発されていくことでさまざまな課題が解決され、徐々に社会に普及していくことが期待されます。

3. 多目的自律走行ロボット
3.1 事業背景
無人地上車両(UGV:Unmanned Ground Vehicle)(以下、UGV)の自律走行(自動運転)技術は、民生分野で近年急速に進展しています。一例としては、自動車の自動走行、自動配送、重機自動作業などのさまざまな用途・業種において実証実験や実用化が進められています。防衛分野においても、コンボイ走行などによる物資運搬、災害対処、爆発物処理などの防衛特有の運用を想定したUGVに関する研究開発、実証実験などが各国で盛んに行われています。防衛用途向けのUGVの特徴としては、無舗装路や不整地などを含む過酷な走行環境への対応が必要であることや、詳細な電子地図などのインフラストラクチャが少ない環境への対応が必要であることなどが挙げられます5)。
日本においても、防衛用途のUGVの実現に資するべく、自律走行技術に関する研究開発が進められてきました。第3章では、防衛装備庁の研究試作事業「多目的自律走行ロボットの研究試作」にて設計・製造した、研究試作品について紹介します。
3.2 多目的自律走行ロボットの構成
多目的自律走行ロボットは、図1のように「装輪車両ロボット」と「装軌車両ロボット」の2種類の車両ロボットと、自律走行の実現に必要なソフトウェア群を集約した「自律走行モジュール」を中心に構成されます。装輪車両ロボットは、バギー車両をベース車両として構築し、主に舗装路及び無舗装路での自律走行性能検証を目的に開発を行ったものです。装軌車両ロボットは、クローラ車両をベース車両としたもので、主に無舗装路及び不整地での自律走行性能検証を目的とし、更に遠隔把持作業などの検証を目的としたマニピュレータを車両後部に搭載しています。
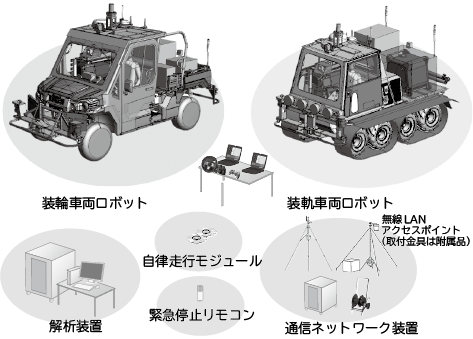
装輪車両ロボットに搭載した代表的なセンサー構成を、図2に示します。三次元LIDAR(Laser Imaging Detection And Ranging)、二次元LIDAR、ミリ波センサー、可視光カメラ、GNSS(Global Navigation Satellite System)センサー及びIMU(Inertial Measurement Unit)センサーを搭載しています。これらのセンサー情報に基づき、自律走行に必要な車両周辺の環境認識、自己位置推定、経路計画及び車両制御を実施しています。

3.3 主要技術
自律走行機能を実現するソフトウェアである自律走行モジュールのうち、無舗装路及び不整地での走行を実現するための主要技術について紹介します。
3.3.1 走行路面認識技術
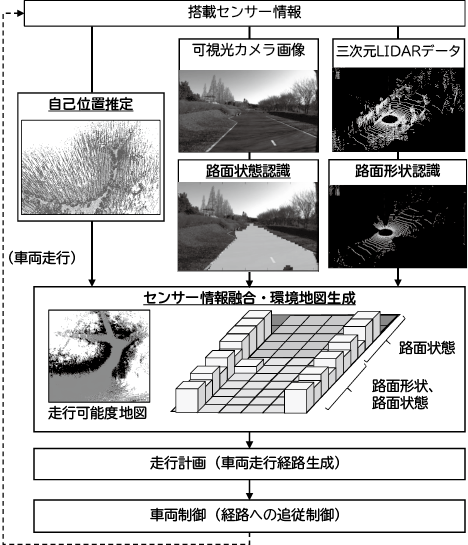
無舗装路及び不整地での自律走行を実現するためには、障害物や路面の凹凸を認識し、車両に適した走行経路を選択する必要があります。本技術は、図3のようにLIDAR及びカメラ画像からのセンサー情報を処理し、車両が走行可能な領域の認識を行うものです。このなかでは、LIDARによる幾何的な形状情報と画像認識による種別認識結果を組み合わせて、走行可能度(路面が走行に適しているか)を推定して、車両近傍の地図情報に重畳するものです。この走行可能度を持った地図情報に基づき、走行に適した経路を生成、追従することで目的地まで移動します。更に、無舗装路及び不整地を中心とした環境でセンサー情報を取集し、追加学習により走行路面認識性能の向上も確認しています。
3.3.2 自己位置推定
GNSS情報、慣性計測装置及び三次元LIDARによる情報を組み合わせて、車両ロボットの自己位置推定を行っています。環境によって各センサーの特性は異なるため、環境に応じた情報融合を行うことで自己位置推定性能の向上を図る試みなども実施しています。
3.4 今後の展望
これまで多目的自律走行ロボットについて走行試験などを通じ、その自律走行性能の向上を進めてきました。この無舗装路及び不整地での自律走行性能向上を支える先端的な画像認識技術や学習技術などはNEC各研究所と連携しながら技術基盤の獲得を行ってきました。更に、走行だけでなく、任務・作業を実施させるための「ロボットと隊員との連携技術」や「群制御技術」などの技術開発も進めてきています。今後は、このような技術基盤を活用し実用化を目指すとともに、他用途への展開を含めた活動を進めていきます。
4. まとめ
防衛分野における重作業の省人化、無人化、隊員のレスカジュアリティの実現に向けたロボティクス技術として、「高機動パワードスーツ」と「多目的自律走行ロボット」を紹介しました。日本の少子高齢化が急速に進むなか、労働力不足を補うために防衛分野と民生分野の双方でロボティクス技術の利用が進んでいくものと思われます。今後も、ロボティクス技術を追求して社会ソリューション事業を推進し、社会に貢献します。
参考文献
- 1)
- 2)
- 3)村上卓弥 ほか:パワードスーツ技術,防衛技術ジャーナル 2019年8月号、No.461,pp.4-11,2019.8
- 4)ISO13482 Robots and robotic devices - Safety requirements for personal care robots
- 5)原崎俊栄 ほか:無舗装路・不整地の自律走行に関する研究,安全工学シンポジウム2019講演予稿集,pp.344-345,2019.7
執筆者プロフィール
石田 尚志
ナショナルセキュリティ・ソリューション事業部
エキスパート
ナショナルセキュリティ・ソリューション事業部
エキスパート
根 和幸
ナショナルセキュリティ・ソリューション事業部
エキスパート
ナショナルセキュリティ・ソリューション事業部
エキスパート