
Japan
サイト内の現在位置
ファルコンは舞い降りた~人と機械のハイブリッド~
インタビュー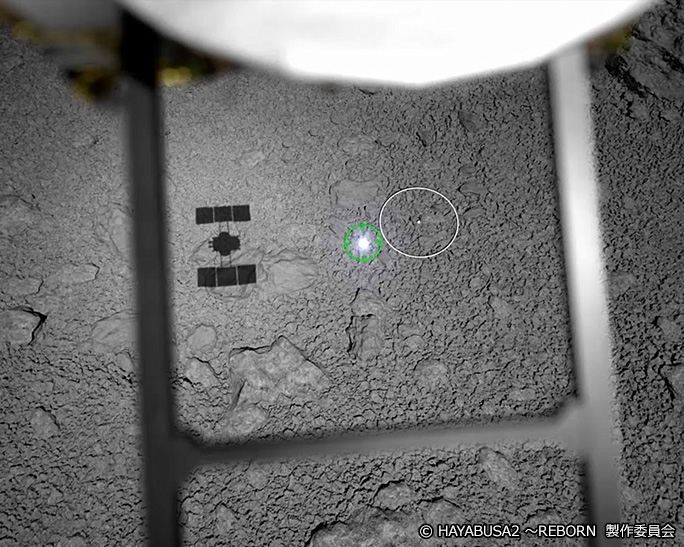
リュウグウ上空45m、「はやぶさ2」の目がひらいた。
2019年2月22日、07:07(日本時間)
フラッシュ点灯!
眼下にターゲットマーカの光が、この光が「はやぶさ2」を導いてくれる
高度8.5m、目標地点上空へ水平移動開始! 4m、5m、そこだ、停止!
最終降下開始、スラスタ噴射、降下速度毎秒10cm
慎重に、慎重に・・・
あと3m、2m
津田雄一プロマネをして「牙をむいた」と言わせたほどの岩だらけで平坦地のない小惑星リュウグウに降下、タッチダウン、そしてサンプル採取を二度も成功させた二人の技術者の話から、その陰に隠された成功への方程式を紐解いてみよう。
松島 幸太
NEC

保田 誠司
NEC

Q:コンテナのなかに1cmに達する大きなサンプルが入っていて、2回のタッチダウン、サンプル採取が完璧に成功したのを目の当たりにした時の思いはいかがでしたか?
松島:正直言って”身震いしました”。打ち上げ前には目で見えるくらいのサンプルがあれば100点満点だと言われていましたから。改めて私たちはやりきったんだなとそんな思いでした。「はやぶさ」初号機(以下「はやぶさ」)から引き継いだ成果がここにあるんだと。
保田:見た瞬間「すごい!」と思わず声が出ました。学生時代に隕石、特にその中に含まれる”コンドリュール(多くの隕石に含まれている球状の粒子)”の研究をしていたので、それがあのサンプルにも入っていたらすごいなと思いましたね。
ファルコンは舞い降りた
Q:岩だらけのリュウグウの姿を目の当たりにした時のお二人の気持ちをお聞きします。
松島:厳しい戦いになるが、挑戦し甲斐があると思いました。
保田:事前の想定では広さ50mくらいの平らな場所があると考えられていたので、「降りられるか?」と思いました。その時に「はやぶさ2」で初めて実装したピンポイントタッチダウンが使えると考え始めました。その後、JAXAと何度も協議してシミュレーションを繰り返しこの方式を採用することになりました。
Q:2019年2月22日の「はやぶさ2」の降下開始から、タッチダウン、サンプル採取までの流れを当時を思い出しながら語ってもらいます。
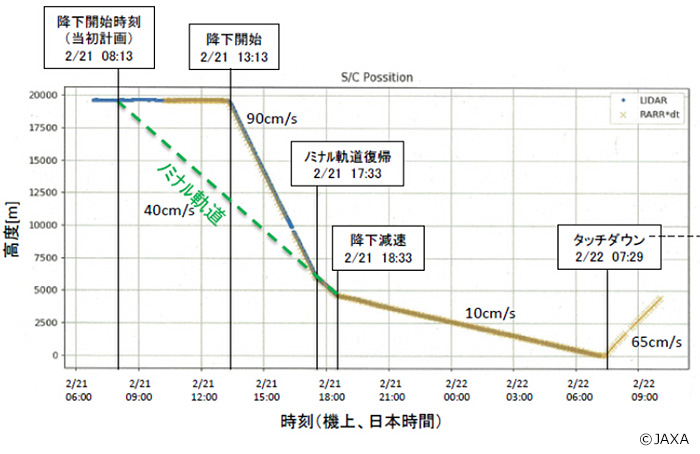
第1回 タッチダウン高度履歴
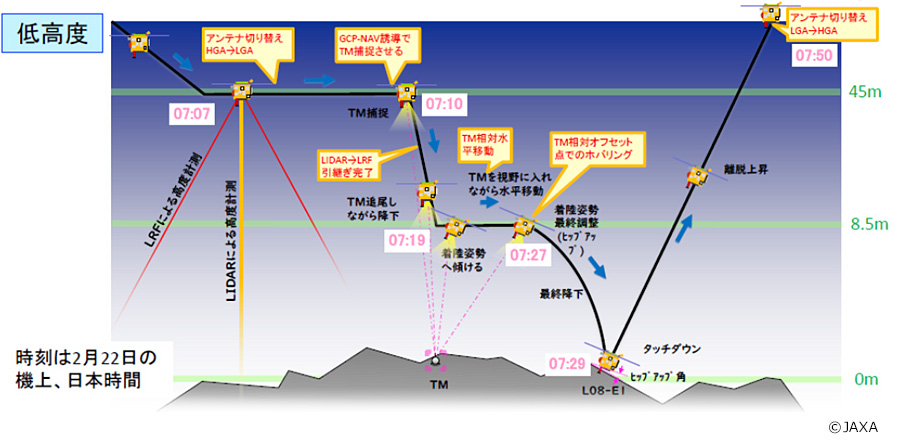
45mからの低高度降下シーケンス
松島:降下開始が遅れたので、秒速90cmで降下しながらおよそ10分に1回ごとに人による地形の照合をやっていました。これによって正確な位置確認が出来ました。だいたい高度500m以下では、地球から3億kmも離れているので地上からの運用では電波の往復に時間がかかりすぎるので、人の手(地上からの運用)から機械(搭載ソフトウエア)による自律的な降下にバトンタッチされます。
Q:ここからの話は、搭載コンピュータのソフトを担当した保田さんに話してもらいましょう。
 拡大する
拡大する(写真右上) 高度8.5m 最終降下へ
(写真左下) 高度0m タッチダウン
(写真右下) 毎秒65cmで 上昇
保田:高度45mくらいでカメラがターゲットマーカ(TM)を見つけます。この時カメラが小惑星を映す通常のモードから、TMを追いかけるモード「ターゲットマーカ・トラッキング」に切り替わります。搭載ソフトの画像処理で捉えたTMの位置から「はやぶさ2」とTMの相対的な位置推定をして、TMの上空へ行きなさいと命令が出ます。
高度28m、高度を測るセンサがライダー(LIDAR)から低高度用のレーザレンジファインダー(LRF)に切り替わります。
高度8.5mに達しました。今TMの上空にいます。ここからがピンポイントタッチダウン運用になります。
TMの横6mにあるタッチダウン目標点をめがけて「はやぶさ2」をスライドさせ、 タッチダウン地点の地表に姿勢が水平になるようにします。
次に、角度10度くらい、ヒップアップします。これはタッチダウンした時に姿勢が傾く側に岩があるのでそれを安全に避けるための姿勢変更です。
上向きのスラスター噴射、秒速10cmで最終降下します。
4m、3m・・・
姿勢の角速度変化から、タッチダウンを検知。
1/32秒後、プロジェクタイル(弾丸)発射
その約1秒後、下向きのスラスターを全噴射し、秒速65cmで上昇!
しばらくして皆で拍手しましたね・・・・

降下から上昇に転じたことを確認した頃の管制室(2019/2/22)
右奥で水色のジャンパーを着用している保田、松島も安堵の表情を見せた。
Q:この時の目標点からのずれはわずか1m、驚異的な精度でした。こんな正確なタッチダウンが可能になった秘訣、言い換えれば「成功への方程式」は何でしょう?
保田:「はやぶさ」の遺産+運用訓練等を通じて培われたはやぶさ2プロジェクトのチーム力だと思います。運用計画立案、手順書作成と検証、レビュー、当日の人を介した運用、自律動作このどれでも欠けてしまうと、1mという高精度のタッチダウンは実現しなかったと思います。
松島:準備と訓練を繰り返すことで、JAXA・NEC間で垣根なく議論ができる体制ができたことだと思います。訓練では何度も壁にぶつかりましたが、レビューやJAXAとNECが協力して問題を解決することで、1つのチームとして対応できるようになった成果だと思います。
Q:ありがとうございました。緊迫の第1回タッチダウンはこのあたりにして、少しお二人の経歴から「はやぶさ2」に至る経緯をお聞きします。
「あかつき」「みお」から「はやぶさ2」へ
松島:学生時代に超小型の衛星CubeSatをやっていました。
地上試験で自分が担当していた部分に不具合が1回だけ発生していて、それが軌道上で再現してしまったのです。いかに事前の検証が大事かを思い知らされました。この経験は今も大きな糧になっていると思っています。学生時代の、衛星をやった喜び、またやりたいという衝動が私をNECに向かわせたと思います。
Q:入社後の経歴はどんなものですか。
松島:2009年に入社しました。
入社してすぐ金星探査機「あかつき」の姿勢制御系に関わりました。2010年12月に金星周回軌道投入に失敗、それから5年目に軌道投入に再トライして世界で初めて成功しました。(一度軌道投入に失敗して再び投入できた例は無い)このリベンジで得た経験が「はやぶさ2」でも活きています。それはシステムと制御系の連携です。これが無いと衛星運用は上手くいかない。タッチダウンは、ものすごく複雑な運用で、両者の連携が必須なのです。「あかつき」の運用と「はやぶさ2」の開発は並行してやりました。「あかつき」の再度の軌道投入(2015年12月7日)と「はやぶさ2」の地球スイングバイ(12月5日)が数日しか差が無くて大変でした。
「はやぶさ2」では制御系設計・機器の調達・試験などを行い、2013年頃から取りまとめとして開発全般をマネジメントし、何とか2014年の打ち上げに滑り込ませました。
Q:今度は保田さんに経歴をお聞きします。
保田:学生時代はお話ししたように地球物理学、特に隕石から太陽系のでき方を研究していました。2009年にNEC航空宇宙システムに入社しました。やはり衛星に関わる仕事ができることが大きかったことと、「はやぶさ2」の軌道担当でもある加藤さんが研究室の先輩だったことが縁でした。
最初に携わったのが水星磁気圏探査機「みお」です。姿勢系搭載ソフトを書いて、検証までやりました。ここで体得したソフトウエア設計や、仕様書の書き方は「はやぶさ2」でも大いに活きました。2011年から「はやぶさ2」に関わり制御系の搭載ソフト開発や、運用検討を主にやりました。
Q:事前のタッチダウンの訓練では、48回やって21回失敗と大変難しい成績だったと聞いてましたが、本番では一度ならず二度も成功を収めたということは、本当の実力だと思いますがいかがでしょうか?
保田:衝突したり、小惑星の裏側に飛んで行ったりと、失敗も多かったけど、とにかくたくさんシミュレーションや運用訓練をやりました。その成果というか、賜物だと思っています。
松島:多くの失敗体験をすることが、成功体験より学んで成長する幅が大きかったと思っています。失敗しても良いのでどんどん訓練をする、そんなやり方でした。
保田:訓練で失敗があっても責められることはありませんでした。JAXAメンバーもなぜこうなったかをいっしょに考えるというスタンスでチーム一体となって取り組みました。
Q:チームとしてのJAXAとNECの関係性について教えて下さい。
松島:白熱した議論を一日10時間もやったこともあります。こういった繰り返しがお互いの信頼の醸成につながったのかなと思います。
保田:JAXAからはこういうことがやりたいと、結構無理な要求もあり「搭載ソフトとしてはここまでしかやれません」というやりとりも随分ありましたね。
松島:NEC(メーカー)ならではという点では、「堅さ」かな。メーカーとして明確に、できることできないことを分別するところでしょうか。JAXAはそこに”こういう方法ができるんじゃないか”といった新しい切り口を提供する。それぞれの役割分担がありました。
受け継がれた遺伝子
Q:松島さんは以前「脈々と受け継がれた遺伝子を大切に」と発言していましたが
その発言の真意は、先輩から引き継がれたものを活かせたということですか?
松島:そうです。「はやぶさ」の経験は大きくて、ずいぶん先輩に教えを請いました。実際に運用に携わると「なるほどこういうことを先輩たちは考えていたのか」と納得できることが多々ありました。
このように、もの作りに対する真摯さはどの衛星でも徹底しているNECの遺伝子ではないかと感じます。
保田:私の場合は「はやぶさ」の搭載ソフトを手掛けた白川さんからの受け継いだことが大きかったと思います。例えば、降下時にGCP-NAVといって、撮影した画像を使って、そこに映った地上のポイントを人が地形と照合して、探査機の位置を知るという「はやぶさ」の運用中に白川さんが考案した手法があります。これを白川さんにサポートしてもらいながら私が「はやぶさ2」用にアレンジしました。こうして高度5km以下では、高度は機械(実際はライダー)水平方向の位置は人(GCP-NAV)が決めるという「人と機械のハイブリッド航法」を使い正確な誘導が実現しました。
より遠くへ
Q:お二人のこれからの抱負を聞かせて下さい。
松島:「はやぶさ2」の成果、経験を伝えなくちゃね。
これから11年もの拡張ミッションもあるし、若手と一緒にやれれば、より一層技術のすそ野が広がると思います。個人的にはより遠くに、木星周辺、誰も行っていない場所まで行ってみたいですね。
保田:若手を育てないといけないけど、やっぱり自分も太陽系の探査に関わり続けたいと思っています。私は輪のある土星がとても好きなので、土星の輪に乗ってその場で観測してみたいな、まだ夢のようだけど。きっといつか。
終章
「はやぶさ」では達成できなかった小惑星表面への二度のタッチダウン、サンプル採取、3機のローバ降下やインパクタを用いた世界初の人工クレータ生成など、予定したすべてのミッションを達成した「はやぶさ2」。その立役者となった技術者たちの自信に満ちた表情が印象的なインタビューとなった。
JAXAとメーカーという立場を越えて目的のために互いに協力し、先輩から受け継いだものをさらに深化させ続けた日々、10年にも及ぶ年月は彼らを大きく成長させた。
その意思を引き継ぐ者たちは、日本の太陽系探査の地平をこれからも拡げることができるだろうか、「はやぶさ2」はそんな者たちへの未来への道標となることであろう。
執筆:小笠原 雅弘
2021年2月17日 公開