Japan
サイト内の現在位置
宇宙に帆をかけて
二人三脚で駆け抜けた2年半
プロジェクトマネージャ NEC 梅里 真弘
電気系システム担当 NEC航空宇宙システム 岡橋 隆一
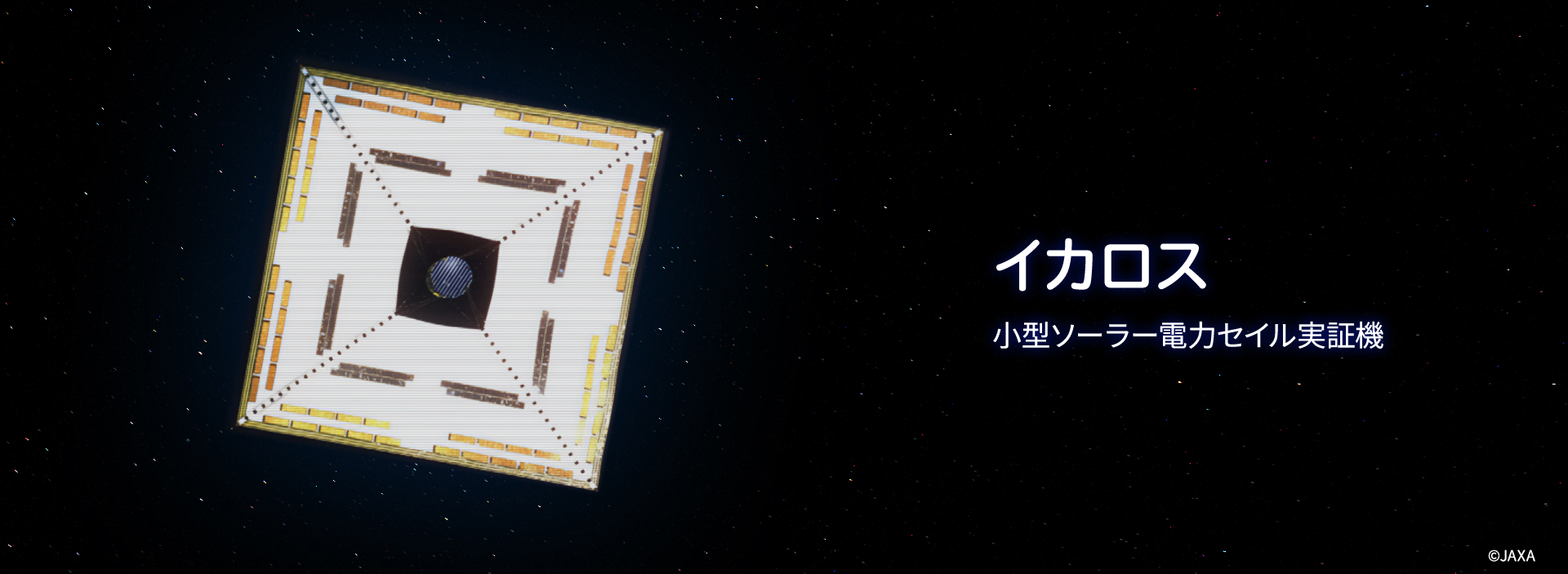
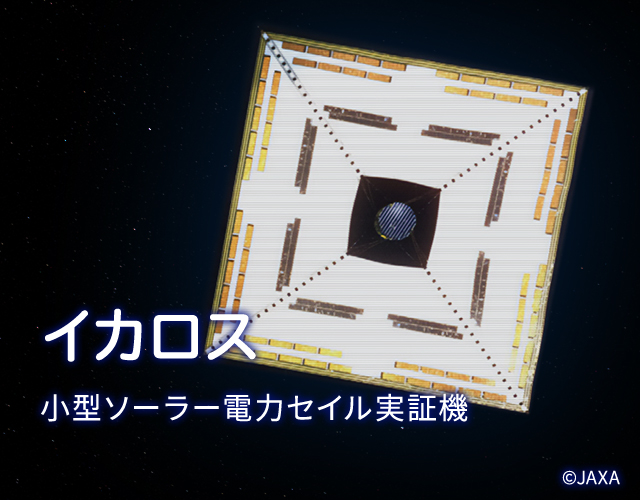
一辺14mもある超軽量の帆に太陽光を受け、光の圧力で加速する――金星探査機「あかつき」と同時に打ち上げられた「イカロス」は、世界初のソーラー電力セイル(宇宙帆船)だ。ロケット推進剤を使わず、太陽光で推進するので、原理的には太陽の光が届く限り加速し続けることができる。光の圧力は微弱で、発生する加速度も小さい。しかし何年も加速し続ければ、ロケットエンジンでは到底実現できない速度に到達することも可能だ。
ソーラー電力セイルを実現するためには超軽量の薄膜を宇宙で展開する必要がある。このため基本的なアイデアは一世紀近く以前からあったが、「イカロス」以前に宇宙空間で実証された例はなかった。2001年と2005年に、アメリカの惑星協会が、試験機を打ち上げたが、共にロケットのトラブルで打ち上げに失敗している。2010年12月にもアメリカのナノセイルが分離後に通信が途絶している(2011年1月追記)。「イカロス」は100年来の人類の夢を最初に実現した世界初のソーラー電力セイルだ。
通常、科学衛星・探査機は開発に5年以上の時間をかける。観測対象に合わせて、新しいセンサーと衛星を開発するからだ。ところが「イカロス」は計画開始から打ち上げまで2年半しかなかった。しかも予算総額は15億円と、通常の探査機に比べれば一桁小さい。
短期間に今までにない試験機を作り上げる。この困難にメーカーとして取り組んだのはNECの技術者2人だった。
- 松浦:
-
「イカロス」は、ソーラー電力セイル(太陽帆)の展開、太陽光による加減速の確認、帆をつかった姿勢制御、とほとんど百点満点に近い成果を挙げていますが、お二人は、これまでどんな衛星を作ってきたのでしょうか。
- 梅里:
-
私は1980年入社で、放送衛星「ゆり3号」、地球観測衛星「だいち」、超高速インターネット衛星「きずな」といった、主に旧宇宙開発事業団系の衛星の開発に携わってきました。プロジェクト・マネージャーとなったのは、この「イカロス」が初めてです。プロマネといっても、専任は岡橋君と2人という最小チームでして、私がプロマネ兼シスマネージャ業務と機械系、岡橋君が電気系を担当しました。
- 岡橋:
-
私は、月探査機のLUNAR-A(計画中止:後述)の開発に参加しました。自分が、長期間かけて開発したのに中止になり、ずいぶん辛いこともあったのですが、2010年は開発を担当した「はやぶさ」カプセルの無事帰還や「イカロス」も成功を収めてくれて本当にうれしい年となりました。
- 松浦:
-
「イカロス」について、おふたりはどのような役割をされたのでしょうか。
- 梅里:
-
「イカロス」が大きく広げるセイルの部分は、JAXAが組み上げています。私たちが担当したのは中央の円筒形の探査機本体部分です。セイル及びセイル展開機構の中心に、私たちが担当した円筒形の探査機本体が入るという構造です。本体には地球との通信装置や、姿勢を検知するセンサー、姿勢や回転速度を制御するスラスターなどが収納されています。私たちがシステム設計を行い、社内の設計や製造のラインに詳細設計と製造をお願いするという手順で作っています。
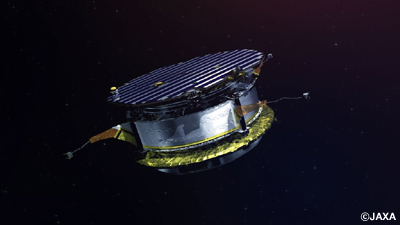
中央部の円筒部分が探査機本体、上部が太陽電池、
今まさにセイル展開が始まろうとしているところ
- 松浦:
-
それにしても2人というのは少ないのではないでしょうか。
- 梅里:
-

プロジェクトマネージャ 梅里 真弘 「イカロス」が急に立ち上げたプロジェクトだったからです。金星探査機「あかつき」は、最初M-Vロケットで打ち上げる前提で設計が進んでいましたが、途中でM-Vが廃止になり、H-IIAロケットで打ち上げることになりました。そこで、H-IIAでうまく打ち上げることができるか解析したところ、軽すぎて第2段で加速している間の振動が過大になってしまうという問題が見つかりました。問題を解決するためには、500kgのあかつきのほかに700kg近いダミー・ペイロード※1を載せて振動を抑制するしかないことが分かったのです。700kgものダミーを金星まで打ち上げるのは無駄です。そこで打ち上げ能力を有効に使うということで、「イカロス」計画がスタートしました。提案したのは、小惑星探査機「はやぶさ」の開発・運用を指揮した川口淳一郎先生です。振動解析の結果が出てから一週間で提案書を書いて、一気に計画を立ち上げたと聞いています。
川口先生は、10年近く以前から、イオンエンジンとソーラー電力セイルを組み合わせて、木星、さらにはトロヤ群小惑星を探査するという計画を提唱しています。そのための準備として、まずソーラー電力セイルの技術実証機を立ち上げたわけです。- ※1ダミー・ペイロード:ロケットの試験機打ち上げの時などに、実際の衛星と重量や大きさを合わせたおもりを搭載して打ち上げることがあります。このおもりをダミー・ペイロードといいます。あかつき打ち上げでは、同時にイカロス相当の重量物を搭載することが、振動軽減のために必須でした。
- ※1
- 岡橋:
-
急に立ち上がったので、予算も時間もなかったんです。予算は総額で約15億円で、開発期間は2年半しかありませんでした。
- 梅里:
-
予算が少ないので、人員も潤沢に配置できず、専任2人ということになりました。開発期間は2年半というのも、普通に考えるとかなり無理をしたスケジュールです。
金星探査機「あかつき」の打ち上げが主な目的ですから、打ち上げ時期は地球と金星の位置関係で決まっていますから、「イカロス」の開発が遅れたからといって待ってくれません。「遅れたら置いていくぞ」というのが、開発当初からの条件でした。いや、置いて行かれて博物館入りぐらいなら、まだましです。打ち上げには、振動を抑制するためのダミー・ウエイトが絶対に必要です。「イカロス」が遅れた場合に使うダミー・ウエイトなど用意していませんでしたから、開発が遅れていたら未完成の「イカロス」を本当におもり代わりに打ち上げていたかも知れません。

- 松浦:
-
お金も時間もない、しかも待ったなしの状況でどうやって「イカロス」を完成させたのですか。
- 岡橋:
-
まず、徹底的に部品を流用することでスケジュールを守りコストを下げました。
- 松浦:
-
部品の流用とは?
- 岡橋:
-
探査機本体は完成したものの、搭載するペネトレータという観測機器の開発が難航したために打ち上げずに終わった月探査機LUNAR-Aの部品を流用しました。『バッテリー』、姿勢を調べるための『太陽センサー』、スピンのブレを吸収する『ニューテーション・ダンパー』※2、『スラスターのバルブ類』などは、LUNAR-Aの部品を使いました。太陽電池からの電力を一定レベルに保つ『電力レギュレーター』は、「はやぶさ」の地上試験モデルからもらっています。
- ※2ニューテーション・ダンパー:コマの回転が遅くなると回転軸がふらふらとゆれます。このような揺れをニューテーション(歳差運動)といいます。スピンする衛星でこのような動きが発生すると具合が悪いため、ニューテーション・ダンパーによりこの揺れを抑制します。円環パイプの中に液体を封入した構造になっており、ニューテーションが起きると液体が揺さぶられ、液体とパイプの間の摩擦で、ニューテーションのエネルギーを熱エネルギーに変えて運動を収束させます。
- ※2
- 梅里:
-
通信機器は、新たに設計するのではなく、「あかつき」に搭載した通信機器をそのまま流用しています。同じ設計のものを製造部門で作ってもらいました。こうすることで設計費用を節約しています。
- 松浦:
-
設計面で「イカロス」ならではの難しさはありましたか。
- 岡橋:
-
「イカロス」の基本構成は、本体が回転して姿勢を安定させるスピン安定という方式です。この形式はシンプルな構成で、技術としても確立していて作りやすいです。その面での心配はありませんでした。
- 梅里:
-
展開する太陽帆の面に、ミリメートルの誤差で「イカロス」の本体の重心が乗っていることという条件があって、これを満たすために内部の機器配置は相当に苦労しました。事前の解析の結果、重心が帆の面からずれると展開時に本体がひっくり返ってしまうことが判明したからです。
- 岡橋:
-
帆があることによる制約は大きかったです。

- 梅里:
-
通常、衛星や探査機の開発では、実機を製造する前にSTM(構造モデル(MTM)と熱モデル(TTM)という実機と同等の熱環境や強度を再現した試験モデル)を作って、真空チャンバーという試験設備に入れて、真空中での温度環境が設計通りになっているかを確認するのですが、「イカロス」ではSTMは作らずに打ち上げ用の実機の熱真空試験※3だけを実施しました。ただし、搭載機器の機械環境条件は事前に確認が必要なので、強度・剛性を再現した構造モデルを作って試験にかけています。
- ※3熱真空試験:宇宙空間の厳しい環境下において、搭載機器の機能に問題がないことを確認する試験のこと。真空状態や太陽直射による高温など、予測されている宇宙環境を、試験機で実際に衛星または機器に与え、各機器の動作チェックを行います。また、宇宙空間に近い環境を作り出す装置を熱真空チャンバーといいます。
- ※3
- 岡橋:
-
熱真空試験は大変でしたねえ。二交代だったから。
- 梅里:
-
そうだったね。熱真空試験は、実機を真空チャンバーに入れて、二週間ぶっつづけで行うのですが、その間ずっと監視していなければなりません。なにしろ担当者が2人しかいないわけです。あれはつらかった…
- 岡橋:
-
打ち上げ一年前ぐらいから、本当にスケジュールが切迫してきました。通常は、搭載機器同士をつないでトラブルがでないかを確認する噛み合わせ試験を実施し、それから実機に組み上げての総合試験を1年近くかけて行います。ところが、噛み合わせ試験の時間がどうしても確保できなかったのです。そこで、総合試験の中で噛み合わせ試験相当の試験も合わせて実施するようにしてスケジュールを守ってきました。
- 梅里:
-
宇宙研からは「スケジュールは3ヶ月の余裕を持っておくように」と言われまして、なんとかそれだけの余裕を確保しました。
リスクは覚悟して、どんどん前に進みましたね。これは通常の開発手法では、絶対にやりません。リスクがあったらいったん立ち止まって徹底的に試験を行い、安全を確認します。「もう一回『イカロス』を作れ」言われれば一回作った経験があるからやりますが、「もう一回ゼロから『イカロス』を作れ」と言われたら…かなり苦しいところです。 - 松浦:
-
具体的にどんなところで、リスクを取って進んだんでしょうか。
- 岡橋:
-
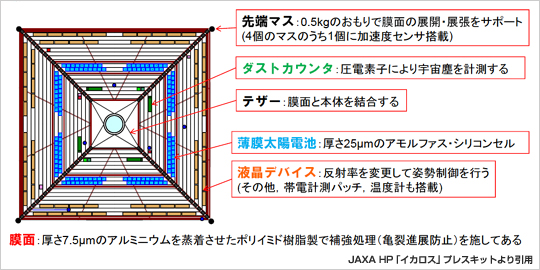
「イカロス」は膜面に薄膜太陽電池やダストカウンタを搭載しています。これらが試験中に異常値を出力しても、膜面はもう折り畳んでしまっていますから広げることができません。いったん広げたら畳むのには大変な手間がかかりますから。
ところが、試験中にダストカウンタの出力にノイズが検出されました。通常の手順であれば原因を徹底的に追求し、場合によっては打ち上げ時期を遅らせて対策を施す場合もありますが、調査結果より実証機外からのノイズである可能性が高い(宇宙に行けばノイズは消えると推測される)こと、検出レベルを高くすることで最低限のミッションは遂行できることなどから、担当の先生方と相談し、スケジュールを優先し現状のまま進めるというご判断を頂きました。充分に検討した上でのご判断ですが、この時点では軌道上での性能を一部制限してしまうリスクを負ってしまったわけです。結果的には打ち上げ後に、ダストカウンタ出力にノイズがのっていないことが確認され、ほっとしました。
- 梅里:
-
それでも岡橋君は、ずいぶんと慎重に開発を進めたよね。JAXAの先生から「岡橋君は石橋を叩いて渡っている」と言われていた(笑)。
- 岡橋:
-
それは、打ち上げできなかったLUNAR-Aの経験が念頭にあったからですよ。あれは悲しい経験でした。だから時間がない中でも慎重でした。いつも「打ち上げに間に合わなかったらどうしよう」という心配がありましたから。なにがあっても打ち上げて、成功させて必ず成果が出るようにしたいと思って仕事をしていました。
- 松浦:
-
「イカロス」だからこそ、逆に楽だったということはありますか。
- 梅里:
-
軽量化に対する要求はあまりきつくなかったです。要求重量は300kgから315kgの間というものでしたから。ただ、それでも最後にバランスウエイトを積む時には重量オーバーにならないように注意しました。
- 松浦:
-
打ち上げ後の運用の印象はどうでしたか。
- 梅里:
-
いやもう、こんなにうまくいくとは思ってもいませんでした。どこかで必ずトラブルは出るものと覚悟して身構えていました。だから今の気分は、「これがフルサクセスというものなのか…」です。
- 岡橋:
-
今だから言えますが、きちんと帆を展開できるかどうか半々だなと思っていました。
- 梅里:
-
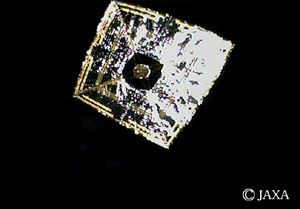
分離カメラも良かったですね。地球を離れた深宇宙で、宇宙機の全体が写った画像を撮影したのは世界初です。開発しているときは「いったいなぜこんなものを付けるのか」と思っていたんですが(笑)、とてもきれいな画像が撮れました。
- 岡橋:
-
あの画像を見たときには「おお、本当に帆が開いている」と感動しましたね。
- 梅里:
-
「イカロス」は、JAXAの森治プロマネらの若くて力のある方々が活躍したプロジェクトです。皆さんの団結力は素晴らしいものだったと思います。その一方で、ベテランの川口先生も全体を見て要所要所を押さえていました。設計会議も可能な限り出席しておられましたね。その川口先生は「『イカロス』は出来過ぎだ。これが普通の開発だと思ってはいけない」と言っていました。これは我々にとっても大きな教訓だと思いますね。
- 岡橋:
-
「イカロス」は300kgと決して小さくありません。衛星の開発期間は大小によって比例するものではありませんが、それでも工夫すれば2年半という短期間でもできるもんだな、と思いました。今回の経験は、今後探査機の開発期間の短縮に役立てることができればと考えています。
次に何をしたいか、という質問に梅里は「『イカロス』は実証機です。実証機は本番があって初めて成果が生きてくる」と答えた。ソーラー電力セイルの本番、それは、「はやぶさ」で実証されたイオンエンジンと組み合わせて、木星やトロヤ群小惑星に向かう、「ソーラー電力セイル」ミッションだ。
技術は科学観測のためのものだが、技術なくして科学観測もあり得ない。「イカロス」は、新たな科学観測のための技術を宇宙空間で実証した。「イカロス」が切り拓いた道の先には、木星とトロヤ群への大航海が待っている。
取材・執筆文 松浦晋也 2010年11月30日
「イカロス」金星通過、フルサクセス達成
「あかつき」金星通過に遅れること1日半、2010年12月8日日本時間16時39分、秒速約3.5kmで「イカロス」は金星から約8万kmのところを通過した。金星の重力が及ぶ範囲は約60万kmなのでこの数値は立派に「金星スイングバイ達成」といえるもの。これによって少しだけ速度を増して、遠日点(太陽から最も遠ざかる点)が地球軌道より外側に達する軌道に移行した。これで「イカロス」は当初予定していたすべてのミッションを終了した。(フルサクセス達成)
12月7日「あかつき」は、金星軌道投入かなわず金星の内側を通過、自らのロケットエンジン噴射と合わせて「パワードスイングバイ」となり、金星より少し小さな軌道に移行、イカロスとは異なった軌道に入った。
世界初のソーラー電力セイル実証衛星として、「イカロス」はまだまだ長い大航海を続ける。
今後のイカロスの動きに注目! (2011年1月5日)
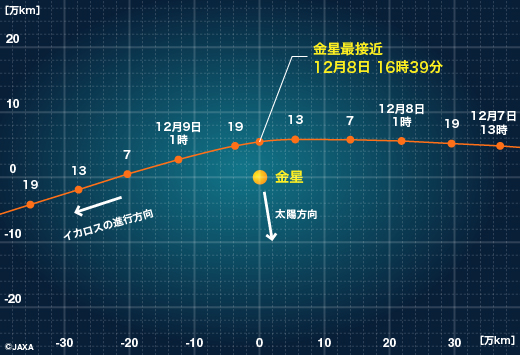
金星を中心にした「イカロス」の軌道
6時間毎の軌道位置を示す(J2000.0 金星中心の赤道座標系、単位は1万km)
「あかつき」の金星接近時の軌道は、金星より内側(太陽側)、「イカロス」は外側を通過していった。
NEC宇宙システム事業部
宇宙システム部 エキスパートエンジニア
梅里 真弘
1980年入社。入社後、科学衛星の構造開発に携わり、「ぎんが」構体や太陽電池パドル構造を開発した。その後、1991年打ち上げの「ゆり3号」の機械系システム設計を経て、1997年頃より「だいち」システム設計、2003年より「きずな」システム設計を担当した。2008年より「イカロス」プロジェクトマネージャ-となり現在に至っている。

NEC航空宇宙システム
宇宙・情報システム事業部 第一技術部
宇宙システム部 主任
岡橋 隆一
1988年入社。入社後科学衛星LUNAR-Aの開発、2000年より「はやぶさ」カプセルの開発などを行い、その後「はやぶさ」システム担当として、「はやぶさ」インテグレーションおよび試験、打ち上げまで担当した。また「みちびき」は、測位システム(準天頂衛星地上系)ミッション系のシステムまとめを担当した。2008年より「イカロス」システム担当となり現在に至っている。


