
Japan
サイト内の現在位置
帰還回廊を目指せ~6年の旅路の先に~
インタビュー
カプセルが地球帰還回廊の真ん中を飛行して秒速12kmで大気圏に突入、火球となって急激に減速してその輝きを失うころ、上空300kmを「はやぶさ2」は地球の大きな重力を感じつつ母なる天体を再び離れようとしていた。
先を急がないと、次の目標までは遠い。
広大な太陽系空間を舞台にした、6年、52億キロもの旅、それを寸分たがわぬ精度で導き続けた軌道制御のチャレンジについて紹介する。
1990年代の「ひてん」やGEOTAILからずっとこの分野に携わり、「はやぶさ初号機」「はやぶさ2」とプロジェクトを引っ張ったベテランの松岡正敏と、2005年に新人として「かぐや」チームに加わり、「はやぶさ2」で松岡と共に軌道運用を担った加藤貴昭の二人に聞いた。
松岡 正敏
NEC航空宇宙システム

加藤 貴昭
NEC航空宇宙システム

Q:まずは「はやぶさ2」カプセル地球帰還おめでとうございます。
現在の気持ちをお聞きします。
松岡:「はやぶさ初号機」(以降「はやぶさ」と記述)でやり残したものを、ようやく終えることができたと感じています。リュウグウのサンプルがコンテナに入っているのを目の当たりにした時に、なぜか「はやぶさ」のことが思い出され「ようやく終わったんだ」という気持ちになりました。個人的には、「はやぶさ」のカプセルが地球に戻ってきたときに、すべてやり切ったと思っていたので、こんな気持ちになったことに大変驚いています。

カプセル帰還後、ダルマに目を入れる松岡。
右はJAXA「はやぶさ2プロジェクトマネージャー」津田雄一さん
(出典:JAXAはやぶさ2プロジェクトのツイッターより引用 )

加藤:小惑星到着、地球帰還前のイオンエンジン軌道制御が終わったときには、自分の任務・使命をなんとかやり遂げ、次のフェーズの担当者に無事バトンを渡せたという事で、肩の荷が下りたという感じでした。
サンプルの写真を見た時は、歓喜一色でしたね。設計開発担当者・さまざまな分野の運用担当者・地上系担当者・カプセル回収班など、数多くのメンバーの手に10年にも及ぶ時をかけて“バトンが渡され”皆がそれぞれの使命を全うしたからこそ、あのサンプルを手に入れる事が出来たんだと思います。
30年かかってここまで来た
Q:「はやぶさ2」プロジェクトに至るまでの経歴をお聞きします。松岡さんはこの分野の経歴が大変長くて豊富ですね。
松岡:1991年以来ずっと軌道や地上システム、運用業務などに携わっています。 入社してすぐの1992年にスイングバイで軌道を変えながら地球周辺環境を観測するGEOTAILを担当しました。28年たった今も運用中で、現役最長老の衛星です。同じころ「ひてん」というスイングバイの試験衛星も担当しました。
「はやぶさ」では初期の軌道設計から関わりました。
打ち上げが何度も延期になり目標が変わるたびに軌道を全て作り直しましたね。
打ち上がってからも地球帰還まで、7年間ずっと「はやぶさ」とは付き合うことになりました。2012年からは「はやぶさ2」の軌道主担当になりました。
最初は「はやぶさ2」の全体システム検討に必要な軌道情報を社内のシステム側に提供しました。私が方針を立てて粗い検討を進め、加藤君がそれを精密化する、そんな二人三脚で進めていました。
Q:加藤さんの名前が出たところで、入社からの経緯を教えてください。
加藤:2005年NEC航空宇宙システムに入社、大学院では隕石中のコンドリュール(多くの隕石に含まれている球状の粒子)の形成過程を調べて太陽系の歴史を調べる研究をやっていました。
入社後すぐに携わったのが月周回観測衛星「かぐや」で、軌道グループに加わりました。
Q:「かぐや」軌道グループで学んだ一番大きなことは何だったのですか
加藤:軌道のことは右も左もわからないところから入ったので「軌道の設計、解析とは」をマニュアルに従ってというよりは先輩たちと一緒に仕事をする中で一つずつ覚えていきました。
「かぐや」では主に軌道制御の検討や、H-ⅡAロケットとのインターフェース、解析ツールの開発を担当しました。検討から、打ち上げ後の軌道/姿勢系運用、そして2009年の月面衝突によるミッションの終了までの全てのフェーズを担当できたというのが経験として大きかったですね。そして次に携わったのが「はやぶさ2」です。
数千回ものシミュレーション
Q: ここからは記憶に新しい復路軌道から2020年12月の地球帰還までについてお聞きしたいと思っています。先ずはリュウグウからの復路運用でのイオンエンジンを使った軌道制御について加藤さんにお聞きします。
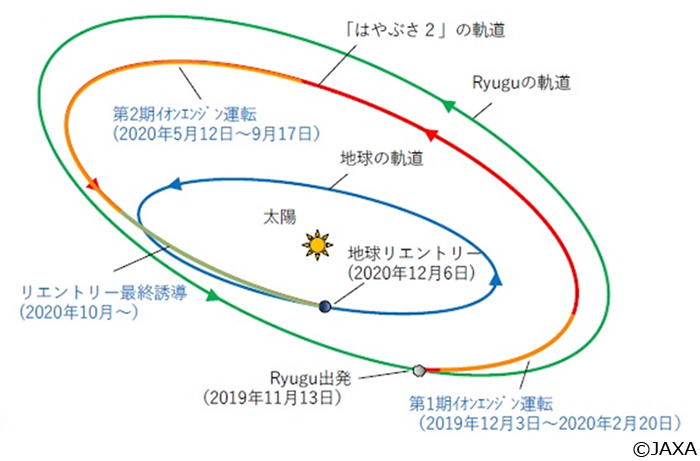
リュウグウ出発から地球帰還までの軌道
加藤:このフェーズでは1週間を単位として運用を回していました。
水曜日に「はやぶさ2」がどこを飛ぶかを決める軌道決定が行われます。木曜日に、私達がどうイオンエンジンを運転するかを決めていきます。JAXAのシステムが探査機全体の運用計画を立てるのが金曜日です。翌週の月曜日にプロジェクトとして運用計画が承認されて、火曜日に「はやぶさ2」にコマンド(命令)が送られる。こんな週単位の運用を行ってきました。
Q:イオンエンジンを使った軌道制御計画を作っていく難しさはどこにありますか?
加藤:ロケットエンジンによる軌道制御は推力が大きいので、短時間で軌道制御ができる。一番効率のよいタイミングを探すという解析が主になります。これはさほど難しくないのです。
一方、イオンエンジンの場合には、推力がとても小さいのです。(イオンエンジンの推力はロケットエンジンの千分の一もない、例えれば地上では一円玉をそっと動かす程度の力しかないのです)ですから短い時間では十分な軌道制御ができません。また姿勢も常に太陽電池パネルを太陽に向ける必要があり、推力を出せる方向も制約されます。その中で、消費する燃料が最小になる計画が必要になります。
これを特別な数値シミュレーションをするソフトウエアを使って毎週行っているのです。
松岡:「はやぶさ」の時には計画を立ててイオンエンジンを噴き始めてもすぐに止まって、計画を白紙に戻して再度やり直し、そんなことを手作業で繰り返しやっていました。
加藤:運用中にトラブルが起き、軌道制御をするはずだった期間にイオンエンジンが運転出来ない場合でも、目標に到達出来る軌道計画を必ず立案しなければいけない。「はやぶさ」の軌道計画ツールはそういった微調整にフレキシブルに対応出来なく苦労したという話を松岡さんから聞いていました。そのため「はやぶさ2」では、異常時の再計画・微調整などを柔軟に対応できるものを新規に作成しました。どんなトラブルが起きても最後は自分に任せろ!という気概で運用に臨みました。実際には「はやぶさ2」のイオンエンジンは極めて調子が良くて止まることもほとんどなく、このツールが本領を発揮する機会はほとんどなかったですね。
Q:これから地球帰還直前の軌道制御のことを松岡さんに聞きましょう。
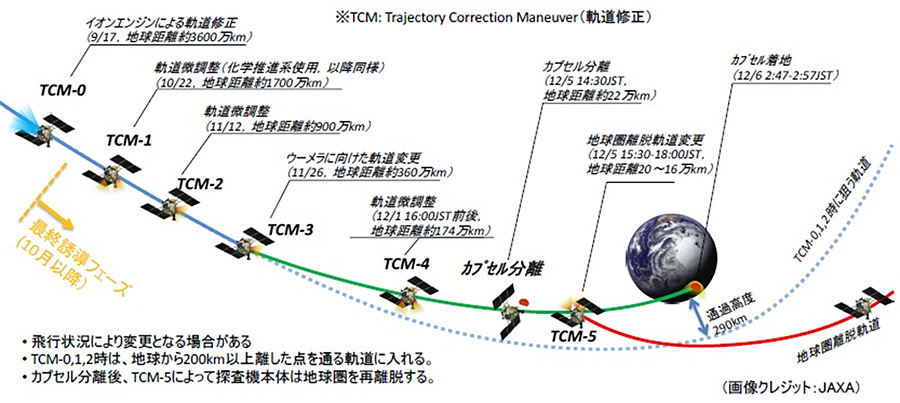
各TCMの役割は
TCM-1、2 地球上空約200kmを通過させるための軌道制御
TCM-3 カプセルをウーメラへ誘導するための軌道制御
TCM-4 TCM-3の微調整
TCM-5 母船を地球大気圏突入から離脱させてスイングバイへもっていく軌道制御
TCM-1、2 地球上空約200kmを通過させるための軌道制御
TCM-3 カプセルをウーメラへ誘導するための軌道制御
TCM-4 TCM-3の微調整
TCM-5 母船を地球大気圏突入から離脱させてスイングバイへもっていく軌道制御
地球帰還軌道(TCM-0からTCM-5まで)
松岡:軌道制御は、軌道チームが提示する候補日をもとに、JAXAのシステム担当が探査機の運用状況を考慮して実施日程を決めます。そこから軌道制御計画の立案日が設定され、何時に軌道決定結果を受け取り、何時に計画立案を完了させ、何時にカプセル回収隊向けの軌道情報を送付する、というようにスケジュールが時間刻みで決まっています。毎回カプセル分離後までの一連の計画立案を行うため、時間内に作業を完了させるのが大変でした。
また、立案は“仮計画日”と“本計画日”の2回実施しており、仮計画は事前のチェックの一つとしていました。
Q:大事な局面で独立した二重のチェックがなされているのですね。それは軌道制御だけでなく「はやぶさ2」プロジェクトすべてに通底する思想のようなものに見えます。
松岡:JAXA津田雄一プロマネも準備のほうがずっと大変だったと話していましたね。TCM(Trajectory Correction Maneuver:軌道制御の略)の訓練も何回もやっていますから。特に軌道ではオーストラリアにカプセルを落とすところが一番気をつかったところで、高度200kmから下、大気圏突入後までを数千回もシミュレーションをやって確認しています。
Q:カプセル分離は一発勝負で非常に難しかったと聞いていますが
カプセル分離
松岡:「はやぶさ」では分離高度7万kmだったのに対し、「はやぶさ2」は22万kmと3倍ほどになりました。
カプセル分離後TCM5を実施して、拡張ミッションのためのスイングバイ軌道に乗せる必要があったからです。実はTCM3の時にもうカプセル分離方向まで決めて設計をするという検討をしました。「常に先回りをして決めていく」そんな感じでしたね。

Q:カプセル分離は単独の検討ではなく、TCM1,2,3と続く一連の軌道制御計画にすでにシナリオとして盛り込み済みだったわけですね。
松岡:対外的にも必要だったと聞いています。カプセルの地球帰還はオーストラリア政府との厳密な約束で決めていかなければならないので余計神経を使っているところもありました。「はやぶさ」では人口稠密なシドニーに落下点が近づくことは絶対に避けなければいけないし、「はやぶさ2」では帰還コースの先に大都市アデレードがありますからここは本当に神経を使ったところです。
Q:帰還後12月8日の会見で、宇宙研の國中所長や、津田プロマネも「COVID-19の広がりで、万が一12月に帰還できなかった場合の軌道も検討していた」という発言をされていましたが、加藤さんはこの検討に加わったとか。
加藤:COVID-19の広がりで、万が一2020年12月にオーストラリアに帰還できなかった場合のバックアップ軌道の検討も2020年の春から夏にかけて実施しました。この検討はTCMに何か異常があった場合のバックアップとしての役割もありました。
Q:本当に細心の注意を払った地球帰還だったことがよくわかりました。
ミッション達成の後に来るもの
Q: これから11年、約100億kmもの長旅になる予定の「はやぶさ2」拡張ミッションの検討はいつごろから始めましたか?
加藤:2020年の春ごろから始めました。これまでは2027年末の地球スイングバイまでの軌道設計を中心にやりました。きっと探査機は無事に飛行してくれると思っています。最後まで見守りたいですね。
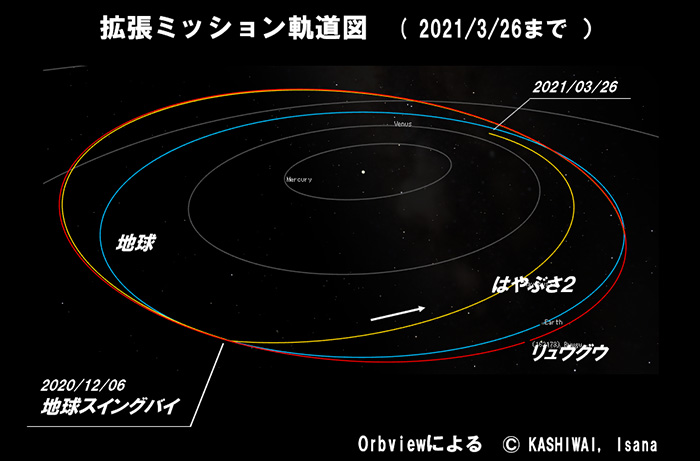
リュウグウを離脱してからの「はやぶさ2」3D軌道図
軌道情報はNASA JPL HORIZONSによる
12/6の地球スイングバイを経て、「はやぶさ2」の軌道が、地球より内側に変わり、軌道の傾きも大きく変わったことがわかる
Q:加藤さんが受け継いだ技術を今後どうしていきたいですか?
加藤:軌道グループで私が先輩たちから引き継いだのが「軌道のキ」です。それを後進に伝えていきたい、自分が育ててもらったわけですから。「はやぶさ2」が1998KY26に到着する11年後は、私も50歳すぎ。今の松岡さんと同じ立場で後輩とやっているかな?
松岡:同じ年だ、今の私と!
社内ではこんなに長く軌道やっているのは他にはいないなあ。昨年から社内講師や学生向けの講演も担当しているので自分の持っている30年分のノウハウ伝えることができればと思っています。
Q:ほかに今持っている技術を展開してどんな将来を考えていますか?
加藤:2020年代にはDestiny+といって、フェートンという活動を止めた彗星の核へイオンエンジンを使って接近、近傍から観測するミッションが予定されています。今度は「はやぶさ2」と異なり小型ロケットでいったん地球周回軌道に打ち上げ、地球を離脱するところから”がんがん”イオンエンジンを使いますから、「はやぶさ2」とは違った難しさがたくさんありますのでやりがいは十分です。

エピローグ
こうして再び太陽系の大航海に向かった「はやぶさ2」。100億kmもの旅路の先に見るものは、私たちの想像を超えた世界なのだろうか。
1990年代から深宇宙探査機の軌道計画に携わった松岡は「30年かかってここまで来た」と述懐する、それを引き継いだ加藤は「あと100億km先へ」と新たな目標を立てる。
2021年1月、すでに地球から1000万kmをはるかに超えた虚空を行く「はやぶさ2」にまた確かな道筋を与えた加藤はつぶやいた「これからもずっと見守るからな・・」と。
執筆:小笠原 雅弘
2021年1月29日 公開