Japan
サイト内の現在位置を表示しています。
スマートモビリティへの取り組み
Vol.67 No.1 2014年11月 社会の安全・安心を支えるパブリックソリューション特集自動車を中心としたスマートモビリティ市場では、自動運転や高度運転支援システムの実現、電気・水素などの環境車普及、クラウドを活用したコネクテッドカーの開発など、「安全・安心」「環境・エコ」「快適・利便」の取り組みに拍車が掛かっており、その実現のために技術は猛スピードで進化を遂げています。
本稿では、スマートモビリティを取り巻く環境の変化(交通事故や環境問題など)、同市場の認識と課題、解決に向けた世の中の取り組みを説明し、この市場に向けたNECの取り組み(映像認識技術、V2X通信技術)を紹介します。
1. はじめに スマートモビリティを取り巻く環境の変化
スマートモビリティを取り巻く環境は、交通事故の抑制、環境問題への対応、ライフスタイル変化などにより、大きな変遷をたどっており、自動車メーカーや自動車部品会社(サプライヤー)はさまざまな取り組みに迫られています。
1.1 交通事故
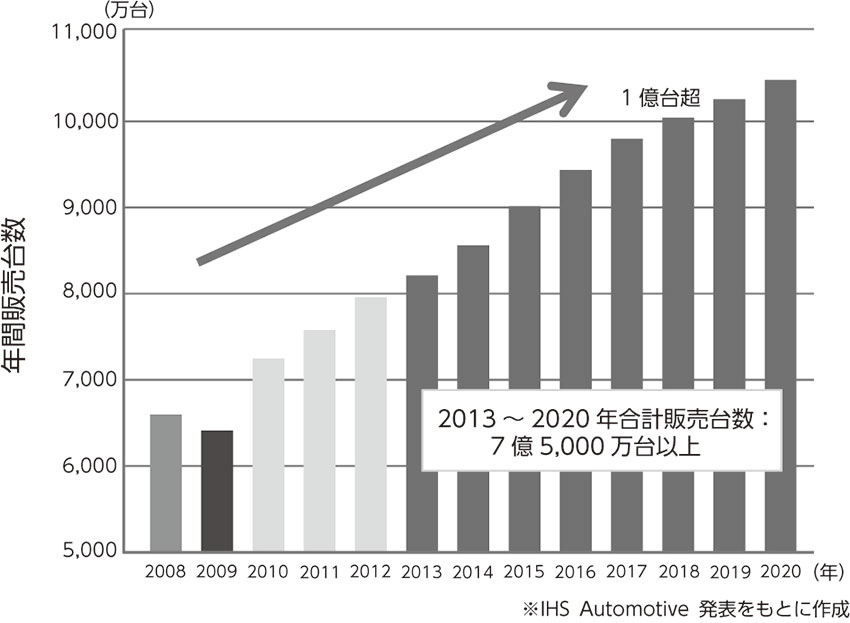
グローバル自動車販売市場は、中国・インドにおける伸びが著しく、引き続き活況であり、2018年には年間販売台数が1億台を突破することが予測されています(図1)。
その一方、世界保健機関(WHO)は世界10大死亡要因として2004年120万件で第9位であった道路交通傷害数が、2030年にはその2倍に到達し、第5位になると予測しています。
アジア圏都市部においては、激しい渋滞と交通事故発生は慢性的な状況にあります。一般的に、車両相互の事故は交差点付近における追突・出会い頭・右左折時などに多く、死亡事故は周辺停車車両前後からの横断・横断歩道外の横断などに多くみられます。また、65歳以上の高齢者が関与する事故も多くなっています。
米国では自動車の安全性確保に向け、新車アセスメントプログラム(New Car Assessment Program:NCAP)を定めています(欧州版:EuroNCAP、日本版:JNCAP)。大型車に対して、欧州は2013年11月に先進緊急ブレーキと車線逸脱警告、日本では2014年からバス・トラックに上記同様の衝突被害軽減ブレーキがそれぞれ義務化されました。また乗用車に対して、欧州ではEuroNCAPが2014年から自動ブレーキを評価項目に加え、その装着が高安全性の条件になっています。
1.2 環境問題
1997年に京都議定書が採択され、日本は温室効果ガス排出量について1990年度を基準年として、2008年度から2012年度の5年間の平均で6%の削減を約束しました。モビリティ市場では、これに端を発してCO2排出量の抑制に向けた動きに拍車が掛かり、自動車メーカー各社は低公害車・低燃費車の普及などに取り組んできました。
欧州ではEU排ガス規制を定め、2015年の排出ガス120g/kmを2021年には95g/kmに削減するという高い目標を定めています。また、米国カリフォルニア州ではZEV(Zero Emission Vehicle:排出ガスを出さない電気自動車や燃料電池車)規制を定めています。これにより、カリフォルニア州内で自動車販売を行う自動車メーカーは、販売台数の一定比率をZEVにしなければなりません。2018年モデルでは4.5%、2025年モデルでは22%と厳しい要求を設定しており、市場参入条件として達成せざるを得ない状況です。
しかし、世界全体での交通による温室効果ガス排出量は増大傾向にあり、近年急激な経済発展が進んでいるアジア諸国における排出量の急増は大きな課題となっています。先進国の主要排出国を含め、その対策は必達すべきものです。
1.3 ライフスタイルの変化
昨今、日本において若年層のクルマ離れが顕著になってきているといわれます。自動車メーカーては、自動車産業の衰退につながるものと危惧し、その対策に乗り出しています。
また、その影響もあり運転操作が未熟な若年層が増えているともいわれます。更に、人口の高齢化に比例して、高齢者ドライバーも増加し続けています。特定個所(家族の送迎、スーパーマーケットなど)でのみ運転する人もいれば、疲れた体に鞭を打ちながら運転する人もいます。このようにライフスタイルが変化するなか、運転者がどのような状況でも楽に運転できる快適移動空間の実現は、現代ならではの要求だといえます。
2. スマートモビリティの市場認識と課題
「安全・安心」「環境・エコ」「快適・利便」の観点からスマートモビリティの市場認識と取り組むべき課題を述べます。
2.1 安全・安心
スマートモビリティ市場は、自動運転や高度運転支援システム(Advanced Driving Assistant System:ADAS)の実現に注力しています。自動運転については、2020年ごろの高速道路を皮切りに、一般道から市街地へと走行範囲を順次拡大すべく、自動車メーカー各社はしのぎを削って開発を進めています。まさにスマートモビリティ時代の到来であり、多くの国際イベントを控えるなか、日本のモノ作り技術の高さを世界にアピールする良い機会だといえます。
自動運転において、クルマが現在位置から目標地点に到達するためには、正確な測位取得と高精度なセンシング(移動体・標識・看板・道路付帯物などの認識)が必要になります。測位はGPSにより取得されますが、メートル級の誤差が発生します。悪天候・明暗・距離精度など、センシング精度もまだ向上の余地は多分にあります。
測位取得とセンシング精度は走行状況把握や行動計画生成において重要であり、精度が低ければ人命にかかわる事故につながります。誤差が少なく精度の高い技術の確立は必達すべき課題です。一方、見えないところのセンシングとしては、通信スポットの設置が期待されます。こうした社会インフラ整備は、国家レベルでの課題です。
2.2 環境・エコ
環境問題に対応するためにスマートモビリティ業界では、クリーンエネルギー車(EV:電気自動車、HV:ハイブリッド車、FCV:水素燃料車など)の開発を進めています。ガソリンエンジン車でも、小型車両を中心に低燃費車両が次々と市場投入されています。
物流・輸送業界では、先に述べた京都議定書対応の一環として、高速道路における大型トラックの最高速度抑制や輸送効率化などに取り組み、環境・エコに効果を出しています。渋滞路や信号機が多い道路はブレーキとアクセルを踏む回数が多くCO2排出量が増えるため、混雑ルートの回避誘導などの対策も進めています。
高速道路ではVICSサービス、近年ではITSスポットサービスから移行するETC2.0により、交通状況・安全情報などを提供するサービス化が進んでおり、これらも交通流緩和に効果的です。
EVの場合、電池残量が減るとスタンドでの充電が必要になります。ディーラー、スーパーマーケット、コンビニエンスストアなどでの充電スタンド設置が増えていますが、十分な状況とはいえません。また、充電に時間が掛かることも課題です。
ガソリンエンジン車は数分でガソリンを給油できます。一方、EVはフル充電で90~200km程度の走行が可能ですが、そのための充電時間は急速充電で30分、自宅充電で8時間ほど掛かります。更に電池の劣化は避けられず、車両購入後から時間経過とともに蓄電容量は徐々に減少していきます。充電スタンドの更なる拡充整備、充電時間の短縮化、省電力化、電池性能の向上、劣化予測技術の確立などの取り組みが必要不可欠です。
FCVの場合、燃料補充に掛かる時間はガソリンエンジン車と同様に数分程度ですが、燃料補充のスタンドが少ない状況です。また水素を使用していることから、一般市民から危険性を不安視する声もあり、そうしたイメージの払拭も必要となります。
これら課題の解決には、継続した技術進歩と社会インフラ整備の両輪からの取り組みが欠かせません。
2.3 快適・利便
自動車メーカーはクルマを単なる移動手段としてではなく、ドライバー個人の趣味嗜好を反映した、快適で楽しい移動空間として、快適性・利便性に富んだクルマの実現が求められています。スポーティーな車両デザイン、空間を広く使える車内デザインなど、個人の好みにあわせた車両の自動セッティングなどの取り組みは、これまでも進められてきました。
また、音楽をはじめとするエンタメ系情報・走行周囲のレストランや店舗情報・娯楽スポットなどを配信するテレマーケティングサービスもこの一環です。更に、運転の苦手な人でもスムーズに操作できるような運転アシストや、面倒な操作を軽減する仕組みも実現してきました。いずれも走る喜びを求め、快適利便を最大限発揮できるよう取り組んでいるものです。
これらの背景にはスマートフォンの普及があり、同機器で実現している機能を、クルマにおいても同じ感覚で操作できることを市場が求めていると捉えることもできます。
自動車メーカーやサプライヤーは、自動車作りの専門家です。テレマーケティングサービスなど、クラウドと通信を使うサービス環境の構築に当たっては、電機メーカーなどとの協業関係を更に密接に築いていく必要があります。
3. 課題解決に向けた世の中の取り組み
前述の市場背景に基づき、スマートモビリティ業界は、パラダイムシフトが起きています。従来は自動車メーカーとサプライヤーが主体となり、クルマの開発・量産を行ってきましたが、今後はビジネス参加者が大きく変わることになります。
最近「クルマのヒューマノイド化」という言葉を聞くようになりました。クルマを人間の身体に例えた表現です。具体的には、「手足」(車両制御)は自動車メーカーとサプライヤー、「目耳」(センサー)・「神経」(インフラ)・「顔口」(ヒューマンインタフェース)・「頭脳」(クラウド・ビッグデータ)はその枠組みを超え電機メーカーがその役割を担っていくと考えられています。
3.1 ナショナルプロジェクトの動向
平成25年6月14日に閣議決定した「世界最先端IT国家創造宣言」では、2018年には交通事故死者数2,500人以下を実現し、2020年には世界で最も安全な道路交通社会の実現と交通渋滞を大幅に削減することを掲げています。
内閣府はナショナルプロジェクトとして戦略的イノベーション創造プログラムを立ち上げ、自動運転技術・情報通信技術の検討をはじめています。交通事故の減少、運転快適性の向上、高齢者など交通弱者の移動支援、渋滞解消・緩和、環境負荷の軽減を目指しています。今後の車両研究に生かすために、大量走行データの収集も進めています。
3.2 自動車メーカー・サプライヤーの動向
「クルマのヒューマノイド化」で述べたとおり、「手足」となる車両制御系は自動車メーカー・サプライヤーがその役割を担います。そのなかでも、アクセル・ステアリング・ブレーキは自動車メーカー、自動運転・ADAS系はサプライヤーという分担で車両開発を進める傾向にあります。
自動車メーカー・サプライヤーは、車両制御系では他業界の力を必要としませんが、安全・安心、環境・エコ、快適・利便をすべて車載側で実現することは困難なことから、電機メーカーと連携することが必須となります。前述のとおりコネクテッドカーの実現においては、自動車メーカー・サプライヤー自身が、クラウドや通信技術を用いたサービス開発そのものに着手することは考えにくいです。
3.3 電機メーカーの動向
自動車メーカー及びサプライヤー中心で開発してきた、従来のスキームは崩れつつあります。バレーパーキングや無人運転サービスなどのコネクテッドカー市場は、2020年には自動車販売市場の半分以上を占めることが予測されており、クラウドとモビリティの連携は必須になります。更にはビッグデータの利活用など、自動車メーカー・サプライヤーの主軸業務にはない技術が必要となり、その技術を保有する電機メーカーとの連携が深くなっていくことは明白です。
現状の車載制御はリアルタイム処理を性能ギリギリで動作させています。自動運転・ADASの本格到来時において、扱うデータ量・処理量は既存チップではまかないきれなくなります。近い将来、超高速処理技術は必ず必要となり、車載機のスーパーコンピュータ化が前提となる時代が来ます。電機メーカーは同技術の研究・製品化を長年手掛けてきたことから、他が追いつくことのできないアドバンテージを持っています。
4. スマートモビリティへの貢献に向けたNECの取り組み
NECは幅広いマーケットを対象にしていることから、広範囲な先端技術を研究しており、そのなかにはモビリティへ転用できる数多くの有用技術があります。ここでは「映像認識技術」と「V2X通信技術」を紹介します。
4.1 映像認識技術
モビリティは「認知→判断→操作」を繰り返して動作しています。危険状態を素早く認知し、走る・曲がる・止まるなどの判断を行いながら運転しているのです。
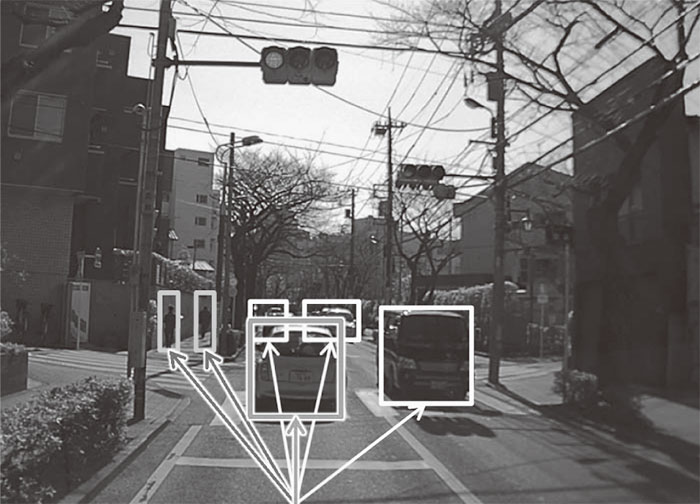
走行状態を認知し、次の行動をとるためには、「走行位置(測位)」に加え、「周辺状態」「車内状態」「ドライバー状態」の状態を正しく認識することが必要です。特に「周辺状態」の認識は安全・安心の実現に必要不可欠であり、NECは長年の研究に基づき、「歩行者認識」と「標識認識」という形で実現しました(図2)。

この技術は、一般化学習ベクトル量子化(Generalized Learning Vector Quantization:GLVQ)というパターン認識技術をベースとしており、従来文字認識装置や顔認証システムなどにおいて、その有効性は実証済みでした。これにカーネルトリックという識別方式(Learning Kernel Classifier:LKC)を融合することで、高精度認識と高速性を実現しています。
なお、NECでは上記技術と並行して、自車両とその周辺の交通参加者(歩行者、乗用車、バス、トラック、バイク、自転車、信号機などの物体)との位置関係をカメラ映像(可視光・単眼)で把握する認識技術、及び機械学習技術を用いた危険予測技術の研究を進めています。
具体的には、「映像フレームごとの物体検知」「距離・向き・速度の算出」「物体追跡」「交通シーン理解」「危険シーン判別」という手順で危険認識を行います(図3)。この技術を用いることにより、自車周辺の交通状況を動きのあるシーンとして捉え、移動体の相対位置関係から危険認識や予測を実現することができるようになります。
4.2 V2X通信技術
カーブの曲がった先に事故車両が止まっている場合、レーダーやカメラなどの車載センサーではその存在に気付けません。その場合、センサーが検知した時点では、事故を回避できない可能性が高くなります。車載センサーだけでは検知できない「見えないところのセンシング」は、昨今重視されるようになってきました。
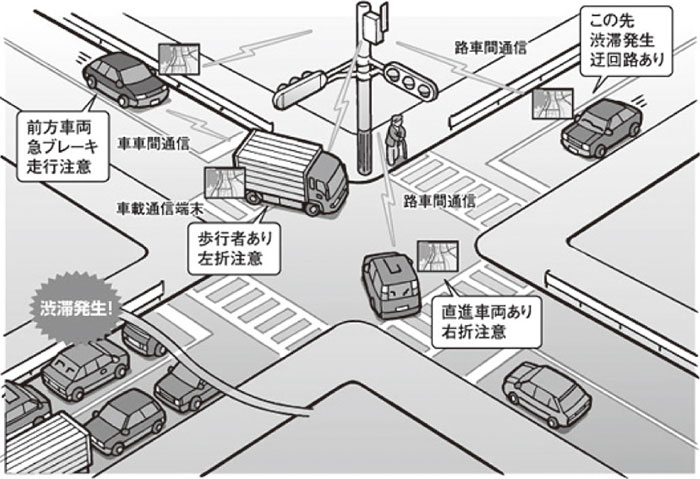
この課題を解決するためには、道路側から事故情報などを配信してもらう路車間通信や、走行中にすれ違う他車と周辺の交通状況などを相互共有する車車間通信という2つの通信技術の活用が有効です(図4)。これはV2X(Vehicle to X:クルマと何かをつなぐ)と呼ばれます。
NECは2000年より欧州自動車メーカー数社と、V2Xの共同研究を開始しています。同技術を用いた通信モジュールを実現して実証検証を行い、欧州標準プロトコルに採用された経緯があります。
また、NECのV2X通信技術には輻輳(ふくそう)制御に優位性があります。複数の周辺車両などと通信を行う場合、電波干渉が発生します。これを防ぐためにNECでは送信電力を制御することにより、干渉問題が発生しないようにしています。
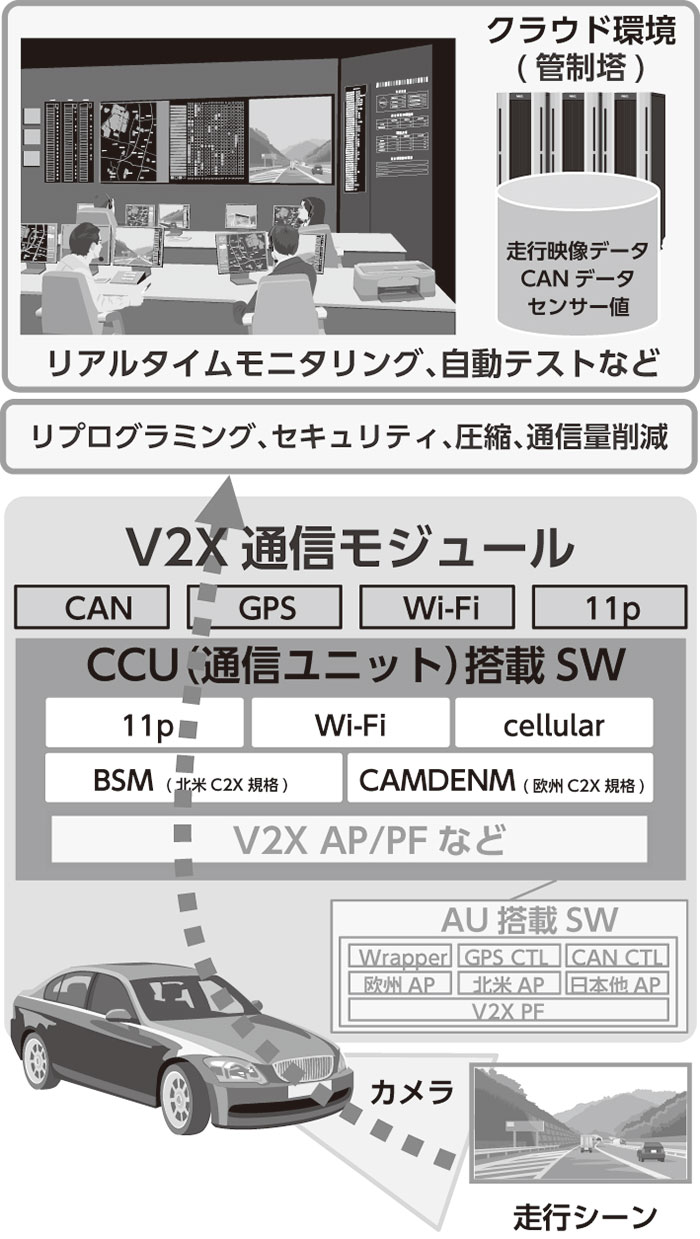
上述した技術の更なる進化版として、欧州のみならず北米プロトコルにも対応した、より小型化した通信モジュールを現在開発しています。将来的にクラウド環境と連携することを想定しており、遠隔監視から車両データ利活用サービスに発展するソリューションにしていく予定です(図5)。
5. 最後に
今回、NECが研究開発している先端技術のなかから、映像認識とV2X通信という一部の技術を紹介しましたが、これ以外にも多くのモビリティ向け技術を有しています。自動車業界向けの取り組みに加えて、NEC中央研究所などのさまざまな先端技術があり、これらを複合化することで、スマートモビリティ市場向けに「NECにしかできない新たな価値ソリューション」を創出し、「安全・安心」「環境・エコ」「快適・利便」に貢献することができるものと考えています。
執筆者プロフィール
新井 秀司
製造・装置業システム開発本部
シニアエキスパート
製造・装置業システム開発本部
シニアエキスパート
早川 晶
第二製造業・自動車ソリューション事業部
部長
第二製造業・自動車ソリューション事業部
部長
加藤 学
製造・装置業システム開発本部
シニアエキスパート
製造・装置業システム開発本部
シニアエキスパート
関根 由紀子
製造・装置業システム開発本部
マネージャー
製造・装置業システム開発本部
マネージャー
木嶋 哲士
製造・装置業システム開発本部
エキスパート
製造・装置業システム開発本部
エキスパート
小林 大
製造・装置業システム開発本部
主任
製造・装置業システム開発本部
主任
進 聡
第二製造業・自動車ソリューション事業部
マネージャー
第二製造業・自動車ソリューション事業部
マネージャー