Japan
サイト内の現在位置を表示しています。
国際宇宙ステーション日本実験棟 「きぼう(JEM)」の開発
Vol.64 No.1 2011年3月 宇宙特集日本は、国際宇宙ステーションの「きぼう」日本実験棟を完成させて、初の有人施設を開発しました。NECは衛星間通信システムとロボットアームの2つのシステムと、管制制御装置、各種実験装置、運用管制システムなどを担当しました。宇宙飛行士の安全確保を最優先とし、かつ、使いやすさと汎用性・多様性などを追求して、それぞれの機器の開発において従来の宇宙開発技術に新しい有人宇宙開発要求を取り込み、日本独自の技術として昇華させました。現在、「きぼう」は24時間体制で監視・運用され、さまざまな宇宙実験が行われています。
1. はじめに
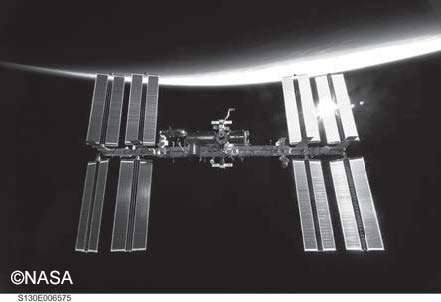
国際宇宙ステーション(ISS:International Space Station)は、地上約400kmの上空にあり、1周約90分で地球を周回する、サッカー場ほどの大きさの有人宇宙施設です。ISSの周りでは大気はほとんど無く、各種の宇宙放射線が降り注ぎ、地上の100万分の1ほどの重力しかありません。ISSは、科学と技術をより進歩させ、人類の現在と将来に役立てることを目的とした実験や研究、地球・天体の観測などを行う施設です。アメリカ、日本、ロシア、ヨーロッパ各国、カナダなど15カ国が開発計画に参加し、1998年に軌道上での組み立てが始まり、2011年に完成予定です。スペースシャトルが撮影した現在のISSが 写真1 です。
日本は、宇宙航空研究開発機構(JAXA)殿を中心に「きぼう」日本実験棟(JEM:Japanese Experiment Module)を開発しました。宇宙飛行士が長期間滞在することができる日本初の有人施設で、3回の打ち上げにより、2009年7月に完成しました。 図1 はCGによる「きぼう」の外観図です。
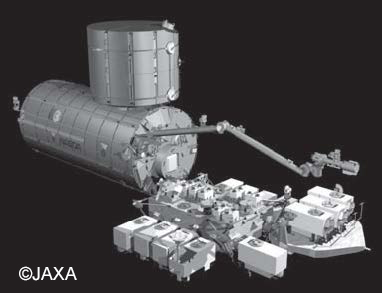
「きぼう」は船内実験室、船外実験プラットフォーム、船内保管室、船外パレット、ロボットアーム、衛星間通信システムの6つのシステムから構成され、NECは衛星間通信システムとロボットアーム、「きぼう」全体の管理を行う管理制御装置や各種実験装置、筑波宇宙センター(TKSC:TsuKuba Space Center)に設けられた「きぼう」運用管制システムを担当しました。
2. 管制制御装置(JCP)
管制制御装置(JCP:JEM Control Processor)は、24時間運用の「きぼう」のメインコンピュータとして、ISSの米国実験棟のコンピュータとも相互通信しながら、「きぼう」全体の運用/制御を担っています。2008年6月に「きぼう」船内実験室が起動されて以来、休みなく動き続けています。
ハードウェアの仕様は開発初期の90年代前半に設定され、32ビットCISCプロセッサを使用し、12Mバイトのメインメモリ、SCSIインタフェースの300Mバイトのハードディスク、及び合計3チャネルのMIL-STD-1553Bネットワークインタフェースを持ちます。なおディスク装置については、現在は第二世代の半導体ディスクにリプレースされています。
ソフトウェアは、リアルタイム実行環境及びファイルシステムを提供し、コマンド・テレメトリ送受信やファイル転送など多様なネットワークサービス、障害発生を監視して自動的に待機系に切り替えるシステム運用管理機能、「きぼう」の自動運用を可能にするプロシージャ実行環境など、「きぼう」全体の運用・制御をサポートするサービスを提供しています。
JCPの特徴を以下に示します。
- (1)冗長構成
JCPは2台による待機冗長システム構成を採用し、万が一、1台に故障が発生しても、自動的にもう1台に切り替える機能を有しています。また、船内実験室内では互いに設置場所を離しており、火災などの局所的な事故が生じても「きぼう」全体の運用が継続できるよう工夫されています。 - (2) 汎用性
待機系のシステムでは、ファイルバックアップやソフトウェアのバージョンアップを行うなど、多様な運用に対応することができます。
実績の高い地上技術を宇宙搭載用に転用し、有人宇宙システムを支える確実なインフラを開発しました。
3. 衛星間通信システム(ICS)
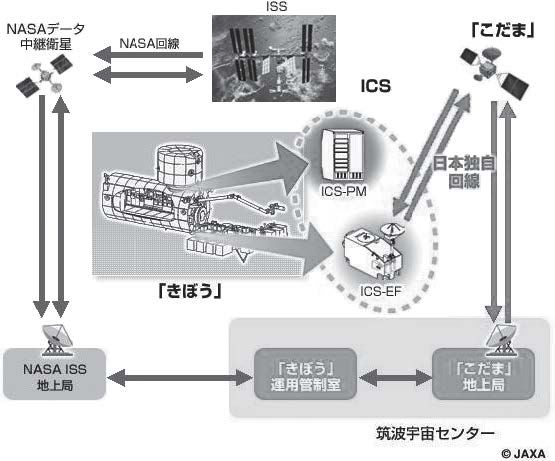
衛星間通信システム(ICS:Inter-Orbit Communication System)は、NASAのシステムを介さずに「きぼう」とTKSCとの直接通信を実現するための「きぼう」側搭載システムです。 図2 にISS/地上間通信アーキテクチャを示します。ICSは「こだま」経由での日本独自の回線にデータを提供します。なお、ICSはベースバンドデータ処理を行う与圧系サブシステム( 写真2 左)と、RF信号処理とアンテナによる送受信を行う曝露系サブシステム(写真2右)とから構成されます。

ICSの特徴を以下に示します。
- (1)柔軟構造物の設置状態での高精度捕捉追尾系
柔軟構造物であるISSからの姿勢擾乱が大きいなかで、遠距離にある「こだま」を高精度で指向するため、ISSの時刻・位置・速度情報、搭載センサ(慣性基準装置、地球センサ、太陽センサ)による自身の高精度姿勢情報から要求精度内での指向を可能にしています。 - (2)双方向マルチメディア通信の実現
宇宙機通信用の国際標準であるCCSDS AOS *1 勧告に完全準拠した、制御用コマンド・データ、高速大容量データ、ビデオ、音声、イーサネットなどのマルチメディアデータ通信を実現しています。 - (3)民生品の活用
専用ICで処理を行うMPEG圧縮、イーサネットプロトコル、ITU-T音声変換は宇宙搭載の実績が無く、民生品の処理ボードを活用しました。部品ごとの評価データが得られず、ボードレベルあるいは装置レベルで安全性を評価し、また内部を冗長構成として信頼性を高めています。 - (4)有人対応安全技術(例:RF放射制御)
ISSでは宇宙飛行士の安全性確保が最重要課題になりますが、ここでは一例としてRF放射制御技術を紹介します。ICSではRF放射は必要な行為である一方、これが機器誤動作、宇宙飛行士の生命維持装置などの誤動作(人命損失)などの被害をもたらす可能性があるため、以下の対策を行いました。- 1)固定構造物にアンテナを向かせない機構を採用。
- 2) 運用計画立案時に「こだま」との通信時間帯を決定し、自動運用し、放射禁止方向での放射を検知したら自動停止する機能。
- 3) 船外活動中の宇宙飛行士がアンテナの近傍で作業する場合の2故障許容の放射停止機能。
- 1)
ICSの技術は、地球から更に遠距離になり、かつ高機能・多様性が求められるであろう今後の有人宇宙通信システムに活用されていきます。
- *1CCSDS AOS: Consultative Committee for Space Data Systems Advanced Orbiting Systems
4. ロボットアーム
「きぼう」日本実験棟のロボットアームは、「きぼう」での実験、保全作業を支援する日本初の実用宇宙ロボットです。日本は、ロボットアーム飛行実証試験(MFD: Manipulator Flight Demonstration)、技術試験衛星VII型(きく7号)の実績があり、「きぼう」日本実験棟のロボットアームは、日本にとって3番目の宇宙用遠隔操作型ロボットアームシステムとなります。これらの宇宙ロボットはすべてNECが開発しました。
ロボットアームは、親アーム、子アーム、運用操作卓からなり、外観を 写真3 と 図3 に示します。
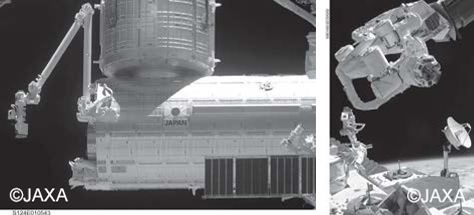
親アームは6個の関節を有する6自由度のロボットアームで、全長10m、質量780kgです。親アームの手先部には、運搬する装置に取り付けられた専用の把持固定部(グラプルフィクスチャー)を把持するための手先効果器(エンドエフェクター)を持ち、最大7,000kgの把持物を把持・運搬可能です。
子アームは同じく6個の関節を有する6自由度のロボットアームで、全長2.2m、質量180kgです。子アームは親アームに把持された状態にて電気・通信ラインが結合することにより駆動可能となります。
親アームは手首部と肘部に、子アームは手首部にカメラを配しており、これらのカメラの画像を見て、宇宙飛行士は運用操作卓からロボットアームを操作します。
親アームは現在、既に宇宙ステーションにて実用ロボットアームとして、実験ペイロードの取り付けや保全作業に使用されています。ロボットアームの特徴を以下に示します。
- (1)親/子アーム構成
親アームは大型構造物の運搬作業を、子アームはボルト回しなどの精密作業を行うことができ、両アームを組み合わせることで多様な作業に対応できます。 - (2)交換可能なシステム構成
親アームの関節機構部、駆動エレクトロニクス部、視覚装置及びエンドエフェクターは、軌道上での故障に備え、宇宙飛行士の船外活動により交換可能な設計で、故障時のリスクを低減しています。従来の衛星では不可能だった交換作業に対応する設計は、ISSのような有人宇宙システムならではの設計要素です。 - (3)有人対応安全技術
ICS同様、ISSの宇宙飛行士の安全性確保が最重要課題であり、ロボットアームでは、次の2つに重点を置きました。- 1)衝突防止機能
衝突防止のため、アーム制御系は、2故障許容としました。特に、船内実験室近傍で作業をする際には、ある距離以内に近づかないように、三重の監視及び停止機能を有し、また、アーム先端部の移動速度はソフトウェアで安全な速度に抑え、衝突した場合でも相手に悪影響を及ぼさないように設計されています。 - 2) 浮遊物発生防止機能
アームが何らかの故障で把持物を放出し、それがISSに衝突すると大変危険です。特に物の受け渡しの際は、確実性が要求されます。そのため、相手方が把持した状態を3種類の信号で確認してから物を離し、更に、物を離すときには、3つのコマンド入力が必要な設計としました。
- 1)
- (4)共通設計
ISSには「きぼう」ロボットアームを含め、3台のロボットシステムが稼働しています。宇宙飛行士の操作の負担を軽減するため、ロボットアームの操作系設計では共通化を積極的に取り入れました。
ロボットアームにより確立された技術は、将来の月惑星表面での基地建設や、惑星表面を無人で探索するロボット及び宇宙のゴミであるスペースデブリを回収する衛星に生かされていく予定です。
5. 運用管制システム(OCS)
「きぼう」の運用管制システム(OCS:Operations Control System)は、地上から「きぼう」を遠隔でコントロール及びモニタするためのシステムで、TKSCにあります。
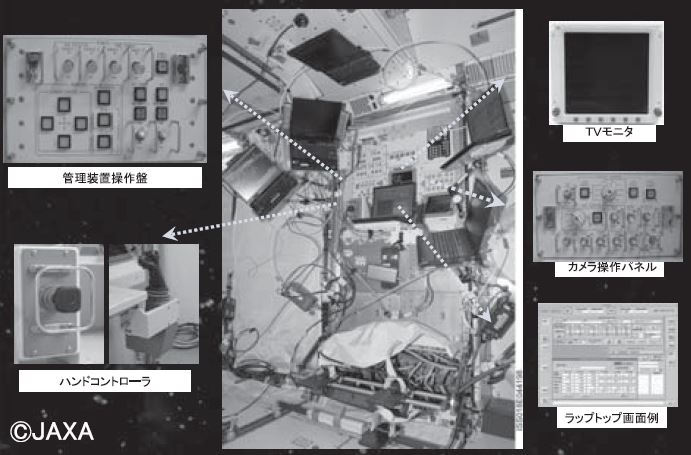
限られた人数の宇宙飛行士が複雑な多くの実験を行うためには、地上からのサポートが欠かせません。OCSは、「きぼう」の実験の支援や、さまざまな設備の制御、監視、映像の受信、NASAとの音声でのやりとりなど、「きぼう」を運用するために必要なすべての管制ができます。 写真4 はOCSでの作業風景です。

OCSは、「きぼう」組み立てミッション第1便(2008年3月11日)以降、運用を開始し、現在も24時間体制で運用が続けられています。
約20台のコンピュータ、約100台の端末、3台の大型スクリーン、約70台の音声端末、その他ビデオ装置やネットワーク機器から構成されています。
「きぼう」の熱制御システム、電力システム、通信システム、空調/温度制御・生命維持システム、ロボティクスシステムの状態が正常であることを端末で常に確認でき、火災、減圧、空気汚染が発生した際には、宇宙飛行士が取るべき行動を音声設備により指示できます。
- (1)構成変更の柔軟性
「きぼう」は通常の人工衛星とは異なり、運用期間中にスペースシャトルやHTVなどによる地上からの補給を受け、新しい実験を行うための実験装置の設置や、性能の良いネットワーク技術の適用など、構成が常に変化します。OCSも新しい「きぼう」に対応した管制ができるように構成を変えるため、信頼性向上のために二重化したシステムの待機リソースを効率良く使い、次期フェーズのデータベースなどの試験や訓練を行っています。 - (2)宇宙飛行士との通信
OCSは、宇宙飛行士との交信のため、音声データのインタフェース機能と、宇宙飛行士の活動モニタのため、映像データのインタフェース機能を有しています。データ系のシステムと、音声系、ビデオ系は分離させ、ISSとの通信手段の多様性を高めています。
「きぼう」の長期運用中、「きぼう」やISS全体は、性能・運用性の高い新しい技術・設備の取り込みを図ることが想定され、OCSも継続して進化し、有人宇宙システムの運用管制 システム技術を蓄積していきます。
6. 宇宙環境計測ミッション装置/全天X線監視装置
「きぼう」では、宇宙環境を利用したさまざまな曝露実験が行われていますが、NECは曝露部の宇宙環境計測ミッション装置(SEDA-AP:Space Environment Data Acquisition Equipment-Attached Payload)や、全天X線監視装置(MAXI:Monitor of All-sky X-ray Image)を開発しました。
SEDA-APは宇宙の百葉箱とも言える多種の観測機器を持ち、宇宙環境データを取得しています。この成果は、将来の有人宇宙活動を支えていきます。 図4 (左)にSEDA-APに搭載されている観測装置と外観を示します。
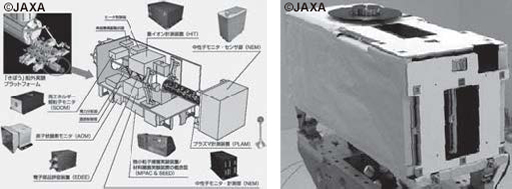
MAXIは、X線を利用して宇宙を観測し、可視光では見ることのできない宇宙の姿を解き明かしてくれています。2010年9月~2011年1月には、3個の新X線天体を発見し、世界の研究者に速報が送られました。
現在、低エネルギーのX線まで感度の優れた全天X線モニタは国際的にMAXIしかないため、世界の天文家からの期待は高く、長期観測が期待されています。
図4(右)にMAXIの外観を示します。
7. おわりに
「きぼう」の完成により、日本は有人宇宙技術を習得しました。これに続く計画として、月や火星の惑星探査計画の検討が始められています。NECは、「きぼう」の有人宇宙開発で培った技術を活用/発展させ、これらの計画に参画していきたいと考えています。
執筆者プロフィール
桑尾 文博
航空宇宙・防衛事業本部
宇宙システム事業部
エキスパート
航空宇宙・防衛事業本部
宇宙システム事業部
エキスパート
大塚 聡子
航空宇宙・防衛事業本部
宇宙システム事業部
エキスパート
航空宇宙・防衛事業本部
宇宙システム事業部
エキスパート
田中 剛彦
航空宇宙・防衛事業本部
宇宙システム事業部
マネージャー
航空宇宙・防衛事業本部
宇宙システム事業部
マネージャー
熊谷 博貴
航空宇宙・防衛事業本部
宇宙システム事業部
エキスパート
航空宇宙・防衛事業本部
宇宙システム事業部
エキスパート
竹貝 朋樹
航空宇宙・防衛事業本部
宇宙システム事業部
主任
航空宇宙・防衛事業本部
宇宙システム事業部
主任
清水 基充
航空宇宙・防衛事業本部
ナショナルセキュリティ・ソリューション事業部
マネージャー
航空宇宙・防衛事業本部
ナショナルセキュリティ・ソリューション事業部
マネージャー