Japan
NEC ロボットタスクプランニング
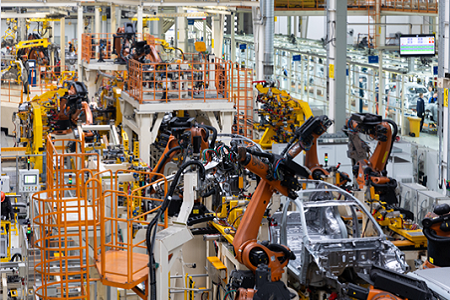
AIが複数のロボットを協調させ、単一作業を分担して行わせるための効率的な動作プランを自動生成することで、製造や物流現場の生産性向上に貢献します。



導入効果
従来、複数ロボットを協調させる動作プランの作成は、熟練技術者がティーチングという作業によってロボットに対し人手で行っていました。この作業は非常に難易度が高く、製造現場では一つの製品を製造するロボットの動作プランを設計するだけでも多大なコストを要するため、複数ロボットを活用した少量多品種への対応が困難となっていました。
本製品は、従来多くの人手をかけて行っていたティーチングを不要化し、AIが成り代わって自動かつ短時間に、より効率的な動作プランを自動で生成することを可能とします。それにより、製造や物流現場における複数ロボットを活用した効率的な作業を実現し、更なる生産性向上を実現します。

特長
☑データに基づいた動作プランの自動生成
AIが入力された製品データを基に、製品の形状や他のロボットとの干渉を加味して、複数のロボットを協調させる動作プランを自動で生成します
☑人の試行錯誤より効率的な動作プランの生成 ※1
これまで専門家が経験で獲得していた最適化ノウハウの選択肢よりも広い空間を、デジタルで高速に探索することで、製品を製造するサイクルタイムを削減する、より効率的な動作プランを生成します
☑短時間での動作プランの生成
AIが複数ロボットの動作プランを従来の専門家によるティーチングより短時間に生成することで、製造品種間の切り替え等のシステム切り替え時間を削減し、少量多品種への対応を可能にします
事例・ユースケース
複数ロボットを活用した製造や物流の様々なシーンにご活用いただけます。

溶接
塗装
組み立て
パートナーシップ
シーメンスデジタルインダストリーズソフトウェアと、ロボット3Dシミュレーション分野における世界的なソリューション拡充を目的とした「Technology Partner Program Agreement」を締結しました。
本締結により、日本およびグローバル市場における、NECの「NEC ロボットタスクプランニング」と、シーメンスの3Dロボットシミュレータ用の「Siemens Process Simulate」を連携したロボットティーチング自動化ソリューションの展開を加速、リソースを相互強化し、お客様の継続的な成長を支援いたします。
・シーメンス社とのTechnology Partner Program Agreement を締結

最新情報・関連リンク
最新情報
- 2025年11月4
- プレスリリース
- 2024年9月10~13日
- 展示会
- 2024年9月6日
- プレスリリース
- 2024年9月4日
- プレスリリース
- 2023年11月9日
- プレスリリース
- 2020年7月27日
- プレスリリース
関連リンク
- ※1) サイクルタイムの削減可否はお客様のアプリケーションに依存します。アプリケーションやお客様のシステムのチューニング状況により、サイクルタイムを削減できない場合があります。
- ※2) 本ソリューションの一部には、国立研究開発法人情報通信研究機構の委託研究(01201)の成果を活用しています。
複数ロボットの効率的な活用について
お気軽にお問合せください
動作イメージや導入事例の詳細を知りたい方は
こちらの資料をご覧ください