Japan
サイト内の現在位置
制御AI
先端AI2025年6月5日
自動化で、働く人が無理をしない社会をつくる
NECの制御AI研究では「働く人が無理をしない社会」の実現をめざしています。機械化や自動化を通じて危険な仕事や煩雑な業務を軽減し、私たち人間が安心して快適に働ける環境をつくることが目標です。ただし、これは全ての業務を人から機械に置き換えるということではありません。あくまでも機械が良き協力者となって人間の作業や判断をサポートし、より効率的で豊かな生活を送ることができる。そのような社会を思い描いて研究をつづけています。
このようなビジョンのもとで、NECが本領域で注力しているのはロボットへの指示を簡略化できる技術です。従来、エンジニアが長時間かけて設定してきた細かい指示やプログラミングをなくし、「ロボットを持ってきたらすぐ使える」ような世界を実現する技術の研究を進めています。
逐一指示しなくても自分で考えて動く制御技術
ロボティクスの技術は進化を遂げ、いまや細かな指示さえ設定すればロボットは精緻に動くようになっています。だからこそ、いまNECが注目しているのはロボットそのものではなく、指示の手間を削減できる技術です。大量データによる学習を繰り返すことで自動操作を実現しようとするアプローチもありますが、これでは現場で仕様変更が発生した際に、素早く柔軟に対応することができません。NECでは、生成AIによる柔軟で精緻な動作を生成する制御技術や、数理最適化の考え方を取り入れた信頼性の高い動作計画技術など、用途・目的に応じた実用的な制御の実現を目指し開発を続けています。
環境に適応し人とロボットが共存するための制御技術
ロボットが人のよき協力者であるためには、作業する人と共存しながら高い作業効率を実現することが必要です。NECではロボットが人を含めた周辺環境を認識し、安全性を損なう不確実性を考慮しながらその時点で最適な動作を実行できる制御技術に取り組んでいます。
主な研究技術
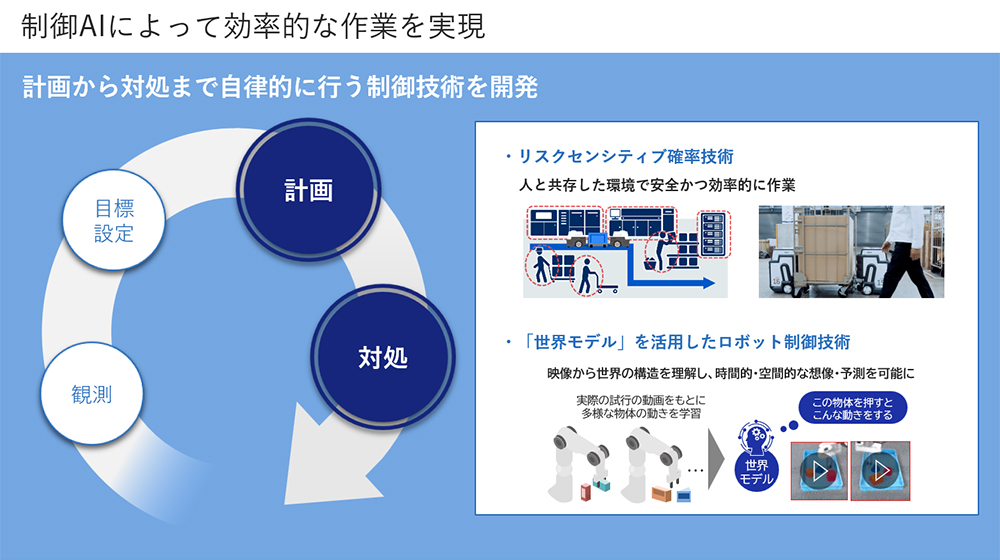
リスクセンシティブ確率制御
ロボット制御において安全性と効率を高レベルで両立させることのできる技術です。安全のため慎重になりすぎると、停止して効率が損なわれてしまうという従来の自動制御技術における欠点を改善。リアルタイムに状況を見ながらリスクを計算し、危険回避指示を逐一出さなくても安全かつ効率的に動くことが可能です。倉庫で荷物を搬送するAGVや自律フォークリフトへの適用を進めています。

目標指向型タスクプランニング
「Aという商品をBという棚に置く」というような目標さえセットすれば、途中の障害物を避ける、届かなければ持ち替えるなどの動作ステップを自動で計画して動くことができるようになる制御技術です。仕様変更にも柔軟に対応可能。これまでロボットの専門家が長時間かけて行っていたティーチング作業を自動化できるため、誰でも簡単にロボットを扱うことが可能です。現在、ロボットアームのピック&プレイスにおける実証実験を進めています。

「世界モデル」を活用したロボット制御
人間は、実際に試す前に将来の様子を想像して、適切な行動をすることができます。同じように、「こうしたら、こうなる」という将来をロボットが“想像”することができれば、過去に試したことのない作業条件でも、最適な行動ができるようになることが期待できます。行動の結果を予測・シミュレーションすることで、多種多様な実世界においてもロボットの的確な動作を可能にする、「世界モデル」を活用した独自のアプローチから研究を進めています。


最新の成果
お問い合わせ