Japan
サイト内の現在位置
遠隔からのロボットの高精度なリアルタイム制御(適応遠隔制御技術)
NECの最先端技術2017.12.6

IoT (Internet of Things) 化の流れの中、さまざまなロボットが通信ネットワーク経由で遠隔から制御されるようになっています。特に、コネクティビティとモビリティの観点から、通信には無線IP (Internet Protocol) 通信が用いられることが多くなってきています。しかし、高精度なリアルタイム制御を必要とするロボットを、無線IP通信で遠隔から制御しようとすると、通信遅延によってセンサ情報や制御コマンドが時間どおりに到着しないため、ロボットを正確に制御することができませんでした。
そこで、NECでは、無線IP通信における通信遅延を高精度に予測し、予測した通信遅延に基づいて先回りの予測制御を実施することで、遠隔地からロボットの高精度なリアルタイム制御を実現する「適応遠隔制御技術」を開発しました。

適応遠隔制御技術は以下の二つの技術的特徴があります。
(1) 高精度な通信遅延予測
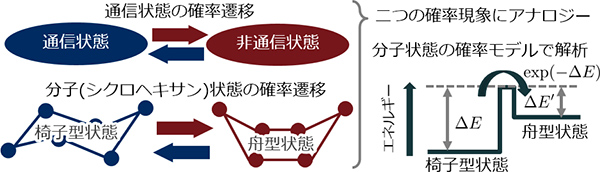
通信ネットワークにおける遅延の発生メカニズムと分子の状態遷移のメカニズムにアナロジー(類比)が存在することを発見。分子の状態遷移の解析手法を応用することで高精度に未来の通信遅延を予測することに成功しました。
- (注1)安田, 吉田 “2状態モデルによる往復遅延時間予測,” 電子情報通信学会 IN研究会, 2017年9月
(2) 通信遅延予測に基づく先回りの制御
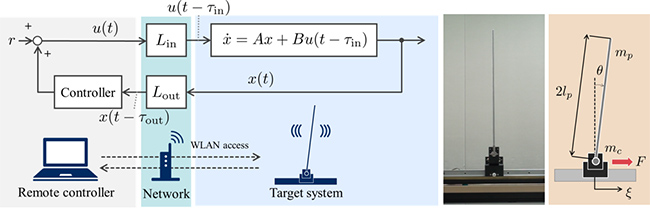
上記の通信遅延予測技術により、ロボットからフィードバックされた情報がどれだけ時間が経過した情報であるか、ロボットへ送信する制御コマンドがどれだけ遅延して到着するかが予測できます。この予測により、制御コマンドが到着する時刻でのロボットの状態を正確に推定するととともに、推定した未来の状態に基づいて先回りの予測制御を行うことで、通信遅延を含む遠隔からも高精度なリアルタイム制御が実現できるようになります(注2,3)。
- (注2)H. Yoshida, K. Kumagai, and K. Satoda, "Dynamic State-Predictive Control for a Remote Control System with Large Delay Fluctuation," IEEE ICCE, Las Vegas, Jan. 2018.
- (注3)K. Kumagai, H. Yoshida, and K. Satoda, "Adaptive Remote Control of a Mobile Robot System with Delay Fluctuation," IEEE ICCE, Las Vegas, Jan. 2018.
- 参考:日本電産との共同研究
- ※本ページに掲載されている情報は、掲載時の情報です。
お問い合わせ