Japan
サイト内の現在位置
AIによる経路予測で搬送ロボットの移動を効率化
安全な高速自律走行を実現する制御技術
NECの最先端技術 2025年8月21日

人手不足や業務効率化の対策として注目されている搬送ロボット。しかし、安全性確保や性能上の限界から移動時間などの効率性には、まだまだ不満が残る場合も多いようです。こうしたなかで今回NECでは、搬送ロボットの経路予測にAIを活用し、大きな効率化を実現する革新的な技術を開発しました。世界でも類を見ないAIの学習方式を採用することで実現したという本技術について、研究者に詳しく話を聞きました。
ルールベースの単純な経路予測にAIを活用
実世界ロボティクス研究グループ
主任研究員
安田 真也
― 安全な高速自律走行を実現する制御技術とは、どのような技術なのでしょうか?
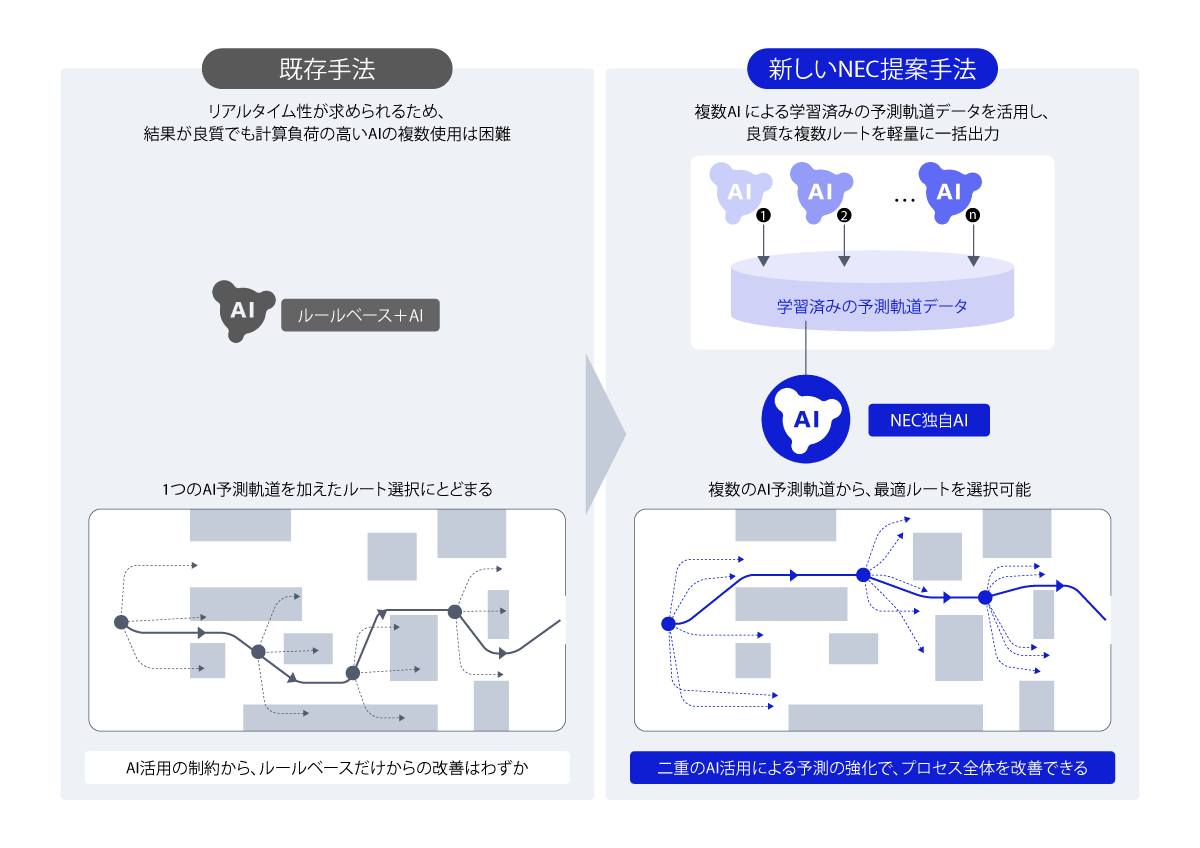
吉田:ロボットの移動をよりスマートにするための技術で、現在は主に倉庫や小売領域での搬送ロボットへの応用を想定しています。一般的に、ロボットは移動する際に自身がこれから進む経路を複数予測したうえで最適なものを選択していますが、このとき従来は「まっすぐ進む」「一度だけ曲がる」などの事前に設計したルールから算出した、比較的単純な軌道をベースにしていました。しかし、この手法で導き出す経路は、どれもあまり精度が高いとは言えません。たとえ数十個の経路を描いても、明らかに障害物にぶつかってしまうものや遠回りで非効率になってしまうものが多く、結局2-3本しか有用なものがないという状態だったのです。そのため、特に障害物が多く狭いスペースでは移動効率が極端に低下してしまうという問題を抱えていました。
そこで、AIを用いることによって、ロボットが予測する経路の精度を高めようと取り組んだのが本技術です。
安田:AIを活用した本技術によってロボットはスムーズに効率よく進むことができるようになり、移動時間を大きく短縮できます。障害物の多い環境下では特に大きな効果を発揮し、従来手法(注1)と比べて最大で50%程度短縮できることを確認しています。
また、一般的に、より先の時間まで経路を予測しようとすると、安全に進むことを優先して慎重に進むようになり、移動効率が低下してしまう傾向があるものです。例えば、将来予測時間幅を1/3に縮めたものと2倍にのばしたものを今回シミュレーションで検証したコースで比較すると、従来手法では平均移動時間が32%も増加してしまうケースも見受けられました。しかし、今回の技術を用いると、平均移動時間は3.9%程度の増加に抑えられます。より先まで見通して安全性を確保しつつも、より高精度で効率的な経路を導き出すことができるようになっているのです。
吉田:NECではこれまでに搬送ロボットのスループットを高めるリスクセンシティブ確率制御技術を開発していますが、これは経路予測の前に、ロボットが動くルールをより実世界の不安定さに適応できるようにする技術であり、予測した経路のなかから選択する際に、リスクを考慮して回避できるようにするという技術でした。この技術と組み合わせることで、さらに搬送ロボットのスループット向上に貢献できると考えています。狭い空間や障害物の多い環境下への導入も、容易になります。例えば、店舗内の通路にダンボールを置いて品出しを行うようなケースでも、搬送ロボットが間を縫って移動し、うまく活用することができるようになります。
- 注1:Reinforcement Learning-based Dynamic Window Approach (RL-based DWA)
AIに二重に学習させるという革新

実世界ロボティクス研究グループ
主幹研究員
吉田 裕志
― AIを活用したとのことですが、本技術をどのように実現したか詳細を教えてください。
吉田:基本的には強化学習を通して経路の精度を上げていくのですが、問題となったのはリアルタイム処理です。AIが経路の候補を何十個も導き出すとなると、計算処理に非常に大きな負荷がかかります。これに対し、搬送ロボットは数十ミリ秒ごとに計算を繰り返して移動するものですから、通常のやり方では到底間に合わないのです。
安田:もう1つの問題は、1つのAIだけではどうしても完全に安全な経路を作ることができないということでした。強化学習は学習時にランダム性があるため、右にかわす傾向があるAIになったり、迂回しがちなAIになったりと、特定の傾向が生じてしまいます。だからといって、先ほど吉田さんから説明があった計算リソースの問題があるので、複数のAIを並行して機能させることもできません。
吉田:これらの大きな問題を安田さんが、独自の方法を生み出して解決してくれました。
安田:はい。なかなかリアルタイム性を実現できず、「遅すぎる」と思いながら何度も何度もプログラムを書き換えて、トライ&エラーを繰り返していきました。経路計算にAIを活用した最新の先行研究も実装したりしてみましたが、あまり良い改善効果は得られなかったため、本当に手探りの状態でした。
そして、ついにたどり着いたのが、AIを二重に使うという方法です。複数のAIにそれぞれ強化学習を行ったあと、さらにそれぞれのAIが出力した結果を教師データとしてまとめて学習し、一気に経路方法を出力できるAIをつくり出すのです。最終的に訓練された方のAIを1つだけ使えば、計算リソースを圧迫させることなく一度にたくさんの高精度な予測が得られるようになり、リアルタイムな制御も可能になります。もちろん、1つのAIでは特定の傾向が生まれてしまって精度が落ちるという問題も解決できます。
吉田:今回は標準的なボックス型PCでも動作するレベルのCPU性能を最大限使い、15個のAIでこの方法が動くことを確認しています。ちなみに、このようにAIを二重に使うという方法は、他の領域でも見られないものです。
安田:そうした点を評価いただけたのか、本技術についてまとめた論文は、権威ある科学ジャーナル 「IEEE Access」( Efficient Dynamic Window Approach With Neural Multi-Trajectory Proposer | IEEE Journals & Magazine | IEEE Xplore)にも掲載されました。
「IEEE Access」( Efficient Dynamic Window Approach With Neural Multi-Trajectory Proposer | IEEE Journals & Magazine | IEEE Xplore)にも掲載されました。
倉庫や小売だけでなく、自動運転への応用も想定
― 本技術の今後の展望を教えてください。
安田:現在はシミュレーションメインで検証した状態なので、今後は実機による検証も含めて現場に近い環境での挙動を確認・検証していきたいと考えています。
吉田:そういう意味では、NECは自社で搬送ロボットを取り扱っていますし、フォークリフトの自律化などにも取り組んでいます。実機や実験場を持っているぶん、この環境を活用しながら研究開発を加速させていきたいですね。
また、今回の技術は、搬送ロボットの効率性だけでなく、安全性も両立させることのできる技術になっています。安全性については1つポイントがあって、今回AIを使っているのは経路の候補を算出するところまでなんです。候補のなかから最終的に経路を選ぶ際には、人間が設計したルールにもとづいたアルゴリズムで選定しています。AIが経路選択までしてしまうことで生じる不安定なリスクを回避できるというのは、大きなポイントです。
こうした長所を踏まえながら、応用先としては冒頭でお話しした倉庫や小売領域だけでなく、自動運転への展開も見据えているところです。さまざまなシーンへの実装をめざして、これからも研究開発を進めていきたいと考えています。


搬送ロボットの安全性を保ちながら、効率化を実現する技術です。従来、ルールベースで構築されていた比較的単純な経路候補に対してAIを活用し、経路の精度を高めて移動時間を最大50%短縮します。
経路予測におけるAI活用においては従来、①強化学習時、AIごとにランダムな特性・傾向が生じる ②処理負荷が大きくリアルタイム性を実現できないという課題がありましたが、今回NECではAIを二重に学習させるという独自の手法を開発。複数のAIで強化学習を行ったのち、各AIの結果全てを教師データとして訓練した1つのAIをつくり出すことで、さまざまな特性・傾向を幅広く学習した経路を一気に計算することができるようになりました。現時点では、標準的なボックス型PC のCPU性能にあわせて15個のAIで本機能の実現を確認しています。このようなAIの二重構造は他分野でも類がなく、本技術をまとめた論文は「IEEE Access」に掲載されました。
- ※本ページに掲載されている内容は、公開時の情報です。
お問い合わせ