Japan
サイト内の現在位置
NEC、人の動きと心理状態を予測する世界モデルを活用し、先回りしてロボットを制御するフィジカルAIを世界で初めて開発
~人が感じる不安を軽減し、人とロボットの協働に貢献~2026年3月12日
日本電気株式会社
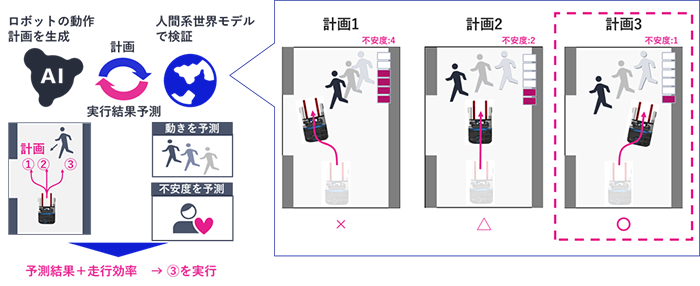
NECは、人の動きと心理状態を予測する独自の「世界モデル(注1、以下人間系世界モデル)」を活用し、人の不安の程度を定量的に推定した上で、不安を高めないように先回りしてロボットを制御するフィジカルAIを、世界で初めて開発しました(注2)。
本技術は、ロボットと人の相対的な位置・姿勢から人の進行方向や人の不安の程度をリアルタイムで予測します。これにより、ロボットが人の不安を軽減できるような経路や速度で自律走行することが可能です。
本技術の導入により、ロボット専用区画が未整備の環境や通路が狭い中小規模の物流倉庫や工場、小売店舗など、これまで心理的ハードルが高かった現場において、人とロボットを分離するレイアウト設計や、あらかじめ固定された走行コースの設計が不要となるため、より柔軟で効率的な運用が実現できます。これにより、ロボット導入が促進され、人手不足の解消と生産性向上に貢献します。NECは、2027年度中に本技術の実用化を目指します。
背景
労働力不足や危険作業への対応策として、フィジカルAIを活用したロボットへの期待が高まっています。人とロボットが協働する現場では、衝突や接触を避ける身体的な安全性に加えて、人の不安を軽減する心理的な安全性も重要です。
しかし、こうした心理的な安全性の確保には課題が多く、ロボットが人の動きや心理を正確に把握し、先を見越して走行を制御することは容易ではありません。ロボットの挙動によっては、人が不安や緊張を感じ、円滑な協働が妨げられる場合もあります。
この心理的な安全性の課題は、ロボットが人の動きや心理を理解し、それに応じて行動するための技術的な課題と密接に関係しています。人とロボットが不安なく協働できる環境を構築するには、こうした仕組みを技術的に実現することが不可欠です。
NECは、これらの課題解決に向けて本技術を開発し、ロボット導入のさらなる促進と、人とロボットの協働環境の実現を通じて、現場の人手不足の解消と生産性向上に貢献します。
また、NECはこれまでフィジカルAI分野で注目を集める世界モデルや、ロボット制御技術の研究開発にも取り組んできました(注3)。これらの取り組みで蓄積された知見やノウハウ、研究成果を融合することで、今回の技術開発が実現しました。
本技術の特長
本技術は、以下の2つの予測モデルを組み合わせて独自に開発した人間系世界モデルを活用しています。これにより、ロボットがとある走行制御を実行した場合に将来の人の不安の程度を予測し、人の動きを先回りした最適な走行制御を実現します。その結果、不要な減速や停止を抑えつつ、移動効率を維持しながら、人の不安の程度を最小限に抑える経路や速度での走行が可能です。
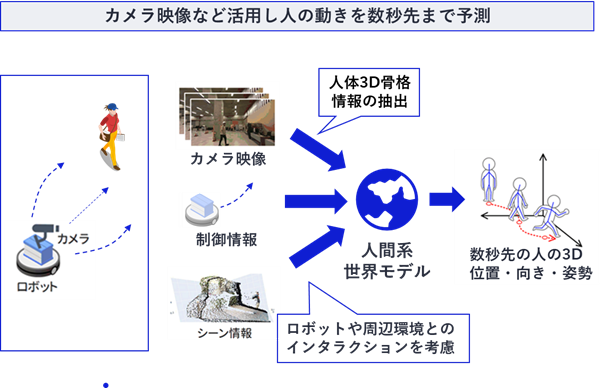
1. ロボットの挙動や物理的な周囲の状況によって変化する人の動きを予測
「人とロボットの挙動」や「人と物理的な周囲の状況」との関係を捉えることで、変化する人の動きを予測できる独自の予測モデルを構築しました。本予測モデルは、人の3D骨格情報を取り入れ、ロボットに搭載されたカメラ映像とロボットの制御情報をもとに、ロボットの挙動や周辺の環境情報を考慮しながら、映像に映る人の数秒後の3次元位置や姿勢を高精度に予測することが可能です。
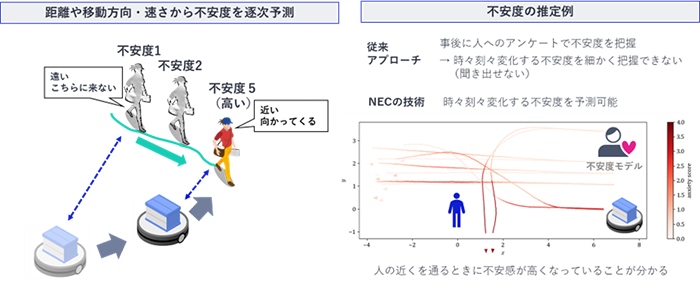
2. ロボットの接近によって変化する、人の不安の程度をリアルタイムかつ定量的に推定
ロボットを被験者の周囲に走らせ、不安の程度をアンケート調査した実験結果と、ロボットの走行データをAIに学習させることで、人とロボットの相対的な位置・姿勢・速度に基づき、人の不安の程度を定量的に推定する独自の予測モデルを構築しました。本モデルにより、ロボットが人に接近した際も、個々の状況に応じて人が感じる不安の程度をリアルタイムで推定することが可能となります。
NECは、フィジカルAIの社会実装を通じて、人とロボットが安心して協働できる現場づくりに貢献します。
以上
- (注1)ロボットが自分で考えて、最適な行動を選択「世界モデル」を応用したロボット動作の学習技術
https://jpn.nec.com/rd/technologies/202210/index.html
「世界モデル」がさらに進化 環境に適応して精密な動きをするロボットAI技術
https://jpn.nec.com/rd/technologies/202316/index.html - (注2)NEC調べ
- (注3)NEC、不規則に配置された物品を自律的かつ高度にハンドリングできるロボットAI技術を開発(2024/2/19)
https://jpn.nec.com/press/202402/20240219_02.html
NEC、倉庫での作業内容やレイアウト変化に柔軟に対応するロボット制御AIを開発(2023/3/3)
https://jpn.nec.com/press/202303/20230303_01.html
本技術について
本件に関するお客さまからのお問い合わせ先
NEC グローバルイノベーション戦略統括部
NECは、安全・安心・公平・効率という
社会価値を創造し、
誰もが人間性を十分に発揮できる
持続可能な社会の実現を目指します。
https://jpn.nec.com/profile/purpose/