Japan
サイト内の現在位置
人工衛星の軌道制御
人工衛星の軌道制御技術は、様々なミッションを成立させるために欠かせない技術です。
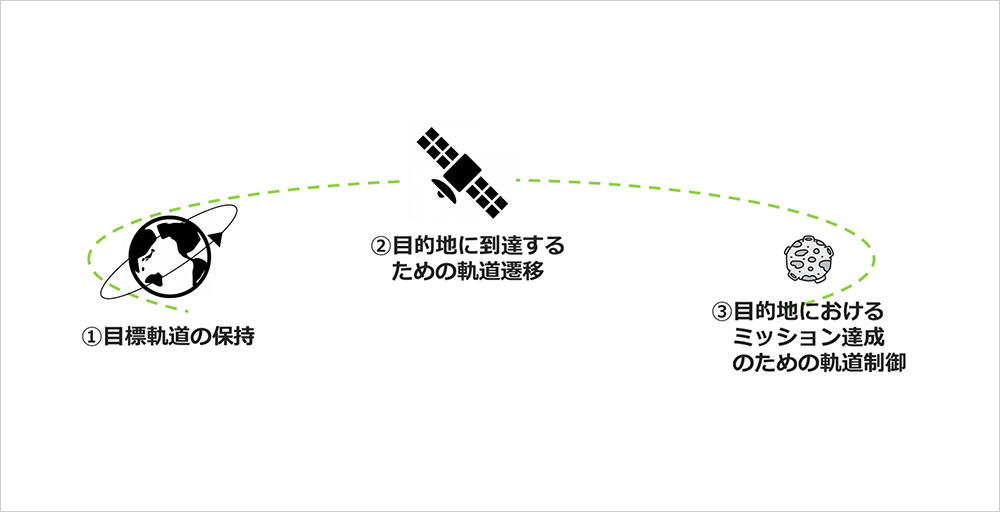
人工衛星の軌道制御は、図1に示すように、「①周回衛星における目標軌道の保持」、「②探査機における目的地に到達するための軌道遷移」、「③はやぶさ、はやぶさ2のような目的地におけるミッション達成のための軌道制御」など様々あります。本稿では、上記について、それぞれの概要を示します。
① 地球周回衛星の目標軌道保持
地球周回衛星では人工衛星のミッションに応じて、最適な軌道が選択されます。地球周回衛星では、宇宙空間であっても大気の影響が無視できず、大気抵抗により徐々に高度が下がってしまいます。このように、人工衛星の軌道に影響を与えるものは外乱と呼ばれ、軌道高度および軌道傾斜角を変動させます。
この軌道変動を修正するため、人工衛星の位置をGPS等によって計測し、目標とする軌道との誤差から軌道制御量を算出し、数日に1回のペースで軌道を修正して、ミッションの継続を支えています。
② 目的地に到達するための軌道遷移
地球から離れて、月、太陽系の惑星、小惑星を観測する探査機は、目的地に到達するための軌道計画を行い、軌道遷移します。
探査機のミッションに応じ様々な条件(例えば、目的の軌道、軌道制御エンジンの能力、軌道制御時の姿勢条件など)があります。様々な条件を考慮しつつ、燃費のよい軌道計画を立てる必要があります。また実際の探査機の運用時には、エンジンの推力誤差等により軌道にずれが生じるため、それを修正するための軌道制御計画を立案します。
NECは宇宙探査の黎明期からの軌道制御計画の知見、ノウハウを有しており、最近ではかぐや(月周回衛星)、あかつき(金星探査機)、はやぶさ、はやぶさ2(小惑星探査機)等の探査機の軌道計画を支えてきました。
③ 目的地におけるミッション達成のための軌道制御
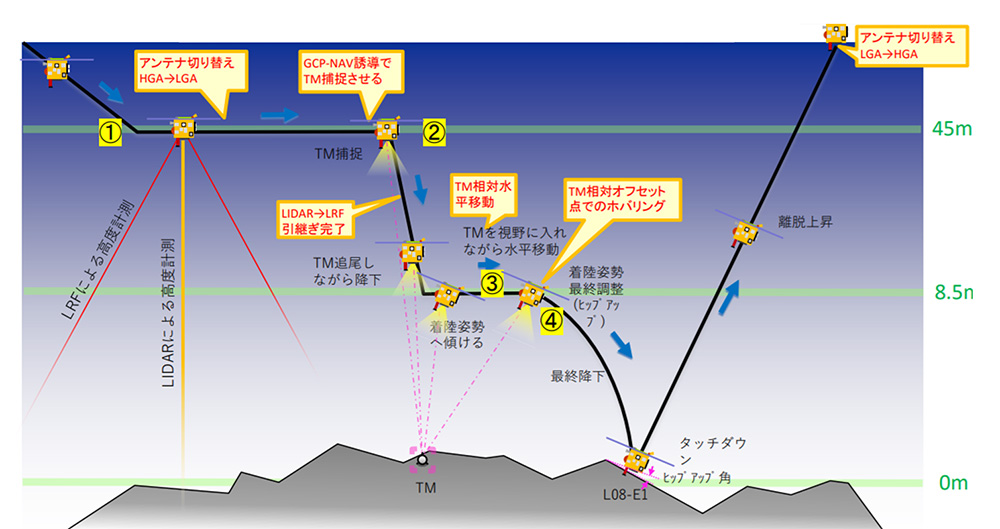
はやぶさ2は、地球から約3億km離れた小惑星Ryuguのタッチダウン目標地点からの誤差約1mの高精度タッチダウンを実現しました。これは、「甲子園の20km上空からマウンドに降り立つくらいの精度」と例えられるくらいの精度です。
小惑星表面付近(約高度50m以下)は非常に温度が高く、滞在時間が30分程度に限られているのに加えて、衛星の状態を確認するテレメトリ、衛星に指示を出すコマンドの通信遅延が往復40分であるため、探査機が自律的に自身の状態を判断して、安全性を確認しながら降下する必要がありました。
NECは図2の降下計画に従い、小惑星上の目印として投下したターゲットマーカ相対の位置を推定し目標軌道に誘導制御する技術および、探査機が自律的にシーケンスを進めるシーケンスプログラム機能を用いて、タッチダウンを成功に導きました。
2025年1月22日