![]()
サイト内の現在位置

2019年2月22日朝、宇宙航空研究開発機構(JAXA)の小惑星探査機「はやぶさ2」は、サンプル採取を目的とした小惑星リュウグウへのタッチダウンに成功しました。リュウグウは岩だらけの地形で、十分な広さの平坦地は存在しません。探査機運用チームが選んだタッチダウンの場所「L08-E1」は、直径6mほどの広さしかありませんでした。地球から約3億キロ離れた900メートルほどのサイズのリュウグウに到着させるだけでも、その難易度は「日本からブラジルにある6センチの的を狙うのと同等」と言われています。今回のミッションはその100倍以上の精度が必要となるのです。
この非常に困難なミッションの成功は、地球からの指令なしで「はやぶさ2」自身が状況を判断してタッチダウンを行う自律制御機能と、「はやぶさ2」に搭載された「6つの科学の眼」が重要な役割を果たしました。
NECは1970年に打ち上げた日本初の人工衛星「おおすみ」以来75機の衛星を開発・製造してきました。「はやぶさ2」もそのうちのひとつです。JAXAの指導のもと「はやぶさ2」全体のシステム設計・組み立て・試験およびインテグレーションを行い、さまざまな技術で貢献してきました。
ここでは、ミッション遂行を支えた「6つの科学の眼」それぞれの役割を紹介します。
執筆 松浦晋也 2019年3月15日
©JAXA
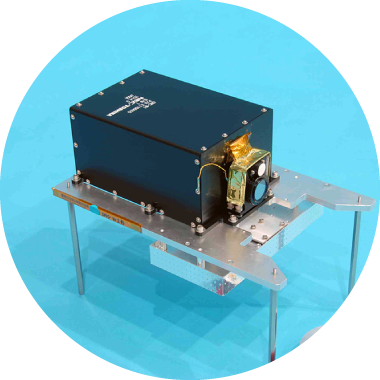
ONC(光学航法カメラ)は、リュウグウを見つめる「はやぶさ2」の目に相当するカメラです。画角が65°と、フルサイズデジタル一眼レフカメラなら、ほぼ焦点距離28mmに相当する超広角カメラとなります。「はやぶさ2」は2基のONCを、「はやぶさ2」の下面(ONC-W1)および、側面(ONC-W2)に装備しています。主力となるのはONC-W1で、タッチダウンにあたっては、高度20kmのホームポジションにいる時から、リュウグウ全体の映像を撮影し続け、「はやぶさ2」を安全かつ正確に目的の場所に誘導する役割を担います。
ONC-W2は、「はやぶさ2」がリュウグウの正面から側面に回り込んだ際に使用します。太陽光が斜めに当たって影が伸びた状態の地形を撮影し、リュウグウ表面の凹凸の状況を調べます。
©JAXA
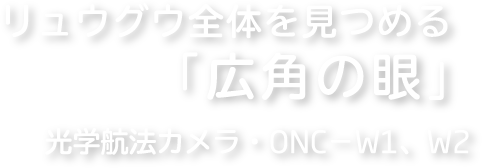
ONC-Tを一言で言えば「望遠レンズを付けたONC」です。視野角は6.3°と、フルサイズデジタル一眼レフカメラなら、ほぼ焦点距離400mmに相当する超望遠レンズを装着しています。同時に入れ替え可能な8種類のフィルターも内蔵していて、リュウグウ表面の鉱物の「色」を調べる機能も持っています。ONC-Wがリュウグウを広い視野で観察するのに対して、ONC-Tは拡大して調べることを目的としています。「はやぶさ2」が撮影した、もっとも細かいものまで識別できるリュウグウ表面の写真は、ONC-Tが撮影したものです。なお、ONC-T/Wは、「光学航法カメラ」という名称からも分かるように、地球からリュウグウへの飛行においては、「はやぶさ2」をごく小さなリュウグウに正確に導くための光学航法に使われました。
©JAXA
リュウグウは炭素を含むC型という区分の小惑星です。C型小惑星には、含水鉱物という、水分子を結晶構造の中に取り込んだ鉱物が存在することが分かっています。この水は、太陽系生成時に鉱物に取り込まれたものである可能性があります。地球が水の惑星であるのも、太古に水を持つ小惑星が大量に表面に落下したからではないかという説もあります。含水鉱物を調べることは、地球の水、さらには生命の起源をも調べることにつながるのです。NIRS3は近赤外線という光を使うことで、リュウグウ表面における含水鉱物の分布、さらにはどれぐらいの割合で水分子が含まれているかを調べます。
*:NIRS3については、明星電気株式会社が開発を担当しました。
©JAXA

TIRは、リュウグウ表面の温度分布を調べる「星のサーモグラフィ」です。リュウグウの昼側の表面は、太陽光が当たって温度が上昇します。温度の上がり方を調べると、リュウグウ内部の構造が分かります。内部構造が分かれば、どのようにしてリュウグウができたか、どんな過程を経て現在の形状に至ったかの推定が可能になります。また、温度の上がり方を調べれば表面の鉱物の粒子の大きさがどんなものかも知ることができます。
また、高温の場所は、近づくと照り返しで「はやぶさ2」本体が過熱してしまいます。このため、TIRは、安全なタッチダウンのため、事前にリュウグウの表面のどこがどれぐらいの温度になるかを調べておく役割も持っています。
©JAXA
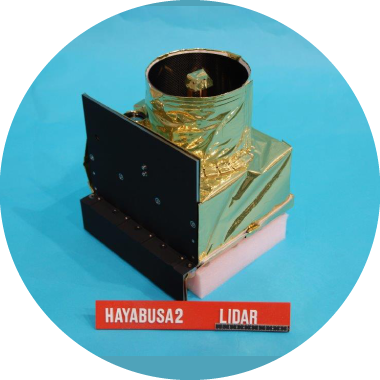
リュウグウへのタッチダウンでは、「今、リュウグウの地表からどれぐらいの距離にいるか」という情報が大変重要になります。LIDARは、レーザー光のパルスを発射して、リュウグウ表面から戻って来た反射光を検出。発射と反射光検出までの時間差で距離を測定するセンサーです。タッチダウンでは、高度20kmから高度45mまでの距離測定をLIDARが担当します*。レーザーはイットリウム・アルミニウム・ガーネットの結晶が発振する「YAG」レーザーを使います。また、レーザー発振を制御し、望んだタイミングで発振する機能を「パッシブQスイッチ」という結晶の物性を使う方式を採用して軽量化しました。
*:今回のタッチダウンでは、高度28m付近までの距離測定を担当しました。

©JAXA
いよいよリュウグウの地表が近づくと、LIDARから距離測定を引き継いで、最後のタッチダウンまで測定を担当するのがLRF-S1です。高度45mで、LIDARから距離測定を引き継ぎます*。最大の相違点は、LIDARがレーザー光1本なのに対して、LRF-S1は4本であること。斜め下4方向にレーザー光を照射して距離を計測し、得られた距離から直下の地形の傾きを計算する機能を持ちます。これはタッチダウン時、「はやぶさ2」が地形に対して垂直にサンプル採取機構を接地させる必要があるためです。ただし、2月22日のタッチダウンでは事前に着陸地点「L08-E1」の傾斜を測定していたため、この傾斜測定機能は使わず、あらかじめ仕込んだコマンドに従って姿勢を変更し、タッチダウンしました。
LRF-S2は、サンプル採取装置の先端の変形をレーザーで常時モニタリングしています。LRF-S2のモニタリング結果により、リュウグウの表面に弾丸を発射するタイミングと「はやぶさ2」が上昇するタイミングが決められます。
*:今回のタッチダウンでは、高度28m付近で引き継ぎました。